XiaoMi-AI文件搜索系统
World File Search System沉重的

thinkgrasp:一种愿景语言系统,用于杂乱无章的战略部分抓住
摘要:由于阻塞和复杂的物体排列,机器人抓握在混乱的环境中仍然是一个重要的挑战。我们开发了ThinkGrasp,这是一种插件的视觉语言握把系统,它利用GPT-4O的高级上下文推理来实现沉重的混乱环境抓地策略。thinkGrasp可以通过使用面向目标的语言来指导去除阻塞物体的障碍物,可以有效地识别和产生目标对象的掌握姿势。这种方法可以从中揭示目标对象,并最终以几个步骤和高成功率掌握了目标对象。在模拟和真实的实验中,ThinkGrasp在沉重的混乱环境中或具有多种看不见的物体中取得了很高的成功率,并且表现出强大的概括能力。
腹腔镜肾切除术:手术前
• 感到疲倦时休息。充足的睡眠有助于恢复。 • 尝试每天散步。开始时比前一天多走一点。一点一点地增加步行量。散步可以促进血液流动,有助于预防肺炎和便秘。 • 避免使用腹部肌肉的运动和剧烈活动,如骑自行车、慢跑、举重或有氧运动,直到医生允许为止。 • 至少 4 周内,避免提起任何会让您劳累的东西。这可能包括孩子、沉重的购物袋和牛奶容器、沉重的公文包或背包、猫砂或狗粮袋或吸尘器。 • 咳嗽或深呼吸时,用枕头盖住医生做的切口(切口)。这将支撑您的腹部并减轻疼痛。 • 按照医生的指示在家做呼吸练习。这将有助于预防肺炎。 • 询问医生您何时可以再次开车。
关于冠状病毒疫苗 - 疫苗接种后的期望 - 简单阅读
使用疫苗后,只要感觉良好,就可以做对自己正常的事情。如果您的手臂非常酸痛,您可能会发现很难抬起沉重的东西。如果您感到不适或很累,应该休息,也不应该使用任何机器或驱动器。
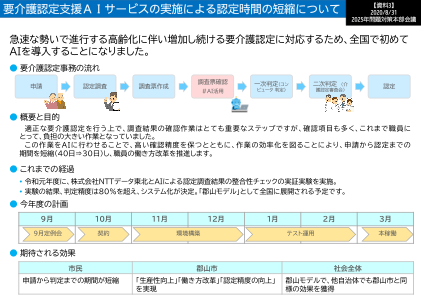
通过实施基于AI的护理认证支持服务来缩短认证时间......
确认调查结果是作出适当的护理证明的一个非常重要的步骤,但需要检查的项目很多,到目前为止这对工作人员来说是一个沉重的负担。 通过让AI承担此项工作,在保持较高确认准确度的同时,提高工作效率,缩短从申请到认证的时间(从40天缩短至30天),推动员工的工作方式改革。
马里兰州公园城市塔科玛
该法案将帮助我们实现我们的城市,县和州温室气体排放目标,以及城市气候,住房以及股权和优先事项。通过专注于服务不足和负担沉重的社区内的社区,以及网络而不是单个地热系统,该法案支持该市的股权目标,并允许更广泛的居民获得高效,电动供暖的好处。

印度农业生产率低的原因
印度的大多数农民都是贫穷的,没有足够的钱来开发土地。农村地区几乎没有机构提供农业贷款。此外,富裕的农民从这些机构提供的贷款中受益。可怜的农民依赖于收取高利率的农村贷款人。因此,在这种沉重的利率负担下,贫穷的农民不能花钱来改善农业。他们还将在收获偿还贷款后立即被迫以非常低的Priceas出售产品。

Pocket RVT - AeroVironment, Inc.
设计的简单性 简单和易用是 Pocket RVT 的主要特点。由于没有外部按钮需要解读,Pocket RVT 完全通过我们易于使用的应用程序进行控制。通过直观的多点触控手势进行滑动、缩放和平移,更改频道、平台或在显示设备上导航图像从未如此简单。使用 Pocket RVT,您可以接收所需的所有信息,而无需背负沉重的视频设备和电池。