XiaoMi-AI文件搜索系统
World File Search System法向力
2023 F = ma 考试 25 道题
无论其他参数如何,盒子都会先滑动。只有当法向力变为零时,盒子才会离开地面,即施加力的垂直分量超过盒子的重量时。在此之前,法向力会非常小,因此可能的最大摩擦力也非常小,无法平衡施加力的水平分量。
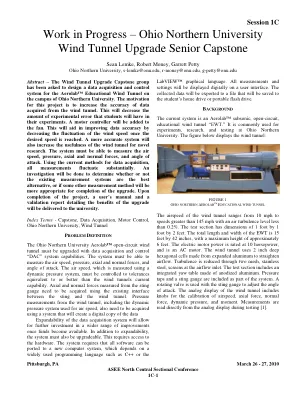
俄亥俄北方大学风洞升级高级顶点课程
摘要 – 风洞升级 Capstone 小组被要求为俄亥俄北方大学校园内的 Aerolab™ 教育风洞设计一个数据采集和控制系统。该项目的目的是提高从风洞获取的数据的准确性。这将减少学生在实验中出现的实验误差。风扇上将增加一个电机控制器。一旦达到所需速度,这将有助于通过减少风速波动来提高数据准确性。更精确的系统还将增加风洞用于新研究的实用性。该系统必须能够测量空气速度、压力、轴向力和法向力以及攻角。使用当前的数据采集方法,所有测量值都会大幅波动。

2024 首席读者报告 - AP 物理 1
• 总体而言,这些回答表明了他们对能量守恒定律和能量条形图表示的掌握。大约 90% 的回答都有两个条形图,其量级总计为 6 个单位。• 部分 (b) 中大约 80% 的回答从能量守恒定律表示开始,并尝试推导出块在 B 点的速度表达式。• 超过一半的回答正确地替换了初始和最终高度,或者将与部分 (a) 中的条形图一致的高度替换为方程式。• 95% 的回答能够正确地绘制重力并将其标记为向下的矢量。• 大约一半的回答能够正确地绘制法向力并将其标记为向下的矢量。• 大约一半的回答指出动能不足,因此速度不足以完成循环。
Microsoft Word - AC-130J AIB 报告 20150930 准备提交
此次事故发生在一次中等风险飞行品质测试中,飞机超出了飞行包线的边缘。事故飞行员(MP)试图执行稳定航向侧滑(SHSS)以触发咨询警告和预警系统(ACAWS)的方向舵特殊警报。这通常是被禁止的动作,但空军物资司令部(AFMC/A3)作战总监签署了豁免书,批准测试团队以这一限制飞行。MA 超过了 14.5 度的侧滑角(AoS),触发了方向舵特殊警报,并且 AoS 继续增加,直到脱离受控飞行,最终翻滚到倒飞位置。此后不久,MA 从脱离状态恢复,事故副驾驶(MCP)接管控制以从近乎垂直的俯冲中恢复。在起飞和恢复过程中,飞机下降了约 5,000 英尺,经历了 3.19 倍的法向力加速度 (Gs),襟翼超速超过 100 节。超速超过了飞机的 DLL,从而使 MA 失去适航性,导致其完全损毁。
1/8 比例翼内风扇模型的风洞试验结果
在兰利 14 英尺乘 22 英尺亚音速风洞中测试了一个 1/8 比例的翼内风扇概念模型。这一概念是格鲁曼航空航天公司(现为诺斯罗普格鲁曼公司)考虑为美国陆军开发的设计(定为 755 型)。悬停测试在隧道附近的模型准备区进行。随着风扇推力的变化,距压力仪表地平面的高度、俯仰角和滚转角都会发生变化。在风洞中,随着风扇推力的变化,攻角和侧滑角、距风洞地板的高度和风速都会发生变化。在模型准备区和风洞中,针对几种配置测量了模型上的空气载荷和表面压力。主要的配置变化是改变安装在风扇出口以产生推进力的叶片角度。在悬停测试中,随着模型离地面高度的降低,推力消除法向力在风扇转速恒定的情况下发生了显著变化。最大的变化通常是高度与风扇出口直径之比小于 2.5。通过使用叶片将风扇出口气流偏向外侧,可以显著减少这种变化。在风洞中,对许多叶片角度配置进行了滚转、偏航和升力控制测试。还评估了襟翼偏转和尾翼入射角等其他配置特征。尽管 V 型尾翼增加了静态纵向 s
![arXiv:2002.10231v1 [cs.CE] 2020 年 1 月 9 日](/simg/3\35ca18c04599157441aec6ae71e064c2537b47a2.webp)
arXiv:2002.10231v1 [cs.CE] 2020 年 1 月 9 日
离散元法 (DEM) 是一种数值技术,用于模拟颗粒系统的行为并研究这些系统的颗粒尺度力学 1 。该方法使用显式时间积分来更新一系列时间步长中每个粒子在每个时间的位置和旋转,需要计算每个接触和每个时间步长的颗粒间接触力。接触运动和接触力之间明确、精确和稳健的关系对于 DEM 代码至关重要,迄今为止最常见的运动-力关系是线性摩擦接触。使用此模型,可以分别计算垂直于接触表面和切向的力分量。在时间 푡 + Δ 푡 时,两个粒子之间的法向(压缩)接触力 푓 n ,푡 +Δ 푡 仅仅是粒子理想轮廓的累积重叠 휁 푡 +Δ 푡 乘以法向接触刚度 푘 n 。在时间步长 Δ 푡 内发生的切向力变化 Δ 퐟 t 等于两个粒子在时间步长内的相对切向运动矢量 Δ 흃 乘以切向刚度 푘 t ,但累积切向力的大小 | 퐟 t ,푡 +Δ 푡 | 仅限于摩擦系数 휇 乘以法向力。这两个规则通常写为

实验无人机减速板的识别与建模
摘要 本文介绍了 FLEXOP H2020 EU 项目框架内无人驾驶实验飞机减速板的建模、系统识别、仿真和飞行测试。由于飞机配备了响应缓慢的喷气发动机,因此在加速飞机进行颤振测试后,需要使用减速板来增加减速,以便保持在当局批准的有限空域内进行飞行测试。减速板由伺服电机、开启机构和减速板控制面本身组成。在简要介绍了演示飞机、减速板设计和实验测试台后,本文参考了以前的工作,对建模和系统识别进行了深入描述。系统识别包括确定高度非线性(饱和和负载相关)伺服执行器动力学以及非线性气动和机械特性,包括刚度和惯性效应。相对于之前的工作,新的贡献是考虑了负载打开或关闭的统一伺服角速度极限模型,考虑了整个偏转和飞机空速范围的减速板法向力和阻力模型的详细构建和评估,提出了统一的气动-机械非线性模型,给出了减速板角度、动态压力和伺服扭矩之间的直接关系,以及基于传递函数的机构刚度和惯性效应建模。确定的伺服动力学模型包括系统延迟、内部饱和、前面提到的负载相关角速度极限模型和传递函数模型。基于考虑减速板整个开启角度和动态负载范围的试验台测量验证了伺服模型。还考虑了新的、未发表的测量结果,其中伺服负载随着伺服移动而逐渐增加,以在更现实的情况下验证模型。然后构建完整的减速板模型并在模拟中测试以检查实际行为。下一步,通过在软件在环 (SIL) Matlab 仿真中使用飞机的基线控制器飞行模拟测试轨迹,对集成到 FLEXOP 飞机非线性仿真模型中的减速板模型进行测试。首先,将独立的减速板仿真与 SIL 结果进行比较,以验证减速板模型与非线性飞机仿真的完美集成。最后,使用实际飞行数据来验证和更新减速板模型并显示减速板的有效性。然后比较有和没有空气制动器的减速时间,强调空气制动器在测试任务中的实用性。