XiaoMi-AI文件搜索系统
World File Search System波高

从越野设置中的长波高光谱图像
近年来,自主导航变得越来越流行。但是,大多数现有的方法在公路导航方面有效,并利用了主动传感器(例如LIDAR)。本文使用Passive传感器,特别是长波(LW)高光谱(HSI)的遍历性估计,重点介绍了自主越野导航。我们提出了一种方法,用于选择一部分高光谱带,该方法通过设计一个最小的传感器设计带选择模块,该模块设计一个最小的传感器,该模块设计了一个最小的传感器,该模块可以测量稀疏采样的光谱带,同时共同训练语义段网络网络,以进行遍历性估计。使用我们的LW HSI数据集在包括森林,沙漠,雪,池塘和开放式田野的各种越野场景中证明了我们方法的有效性。我们的数据集包括在各种天气条件下白天和夜间收集的图像,包括具有广泛障碍的具有挑战性的场景。使用我们的方法,我们学习了所有HSI频段中的一个小子集(2%),这些子频段可以在利用所有高光谱带时获得竞争性或更好的遍历性估计精度。仅使用5个频段,我们的方法能够实现平均类别的效果,该级别仅比使用完整的256波段HSI低1.3%,而仅比使用250频段HSI实现的效果仅比使用了0.1%,这证明了我们方法的成功。

风与显着波高之间的时空关系的统计建模
摘要。许多海洋活动,例如设计海洋结构和规划海洋行动,都需要海态气候的特征。考虑其时空行为,这项研究调查了风状态与海洋国家之间的统计关系。在北大西洋上(预测指标)和三个位置的显着波高(预测和预测)之间建立了传递功能:法国海岸(Gironde)的西南(Gironde),英国通道和缅因州海湾。开发的方法通过包括局部和全球预测因子来考虑风海和膨胀。使用完全数据驱动的方法,定义了全局预测指标的时空结构,以说明风与波之间的非本地和非恒定关系。天气类型是使用回归引导的聚类方法构建的,所得簇对应于不同的波系统(膨胀和风向海域)。然后,在每种天气类型中,预测指标和预测指数之间都拟合了惩罚的线性回归模型。验证分析证明了预测显着波高的模型技能,在三个考虑的位置中,均方根误差约为0.3 m。此外,该研究还讨论了所提出方法的物理见解。
面向无线能量收集的毫米波高效整流
摘要 — 本文介绍了一种用于毫米波应用的 K 波段微带技术的简单双二极管整流电路。设计的整流电路具有特殊的结构,可以将整流波的直流分量与数据相关的 IF 信道分离。讨论了二极管特性以提高效率,这涉及精确的系统模拟。执行优化程序以最大限度地提高 RF-DC 转换效率。对于设计的电路,在 35 mW 输入功率下实现了 40% 的测量效率,与以前的工作相比,效率有所提高。该电路在用于无线电力传输和能量收集的集成微波和毫米波系统的设计中具有潜在的应用价值。
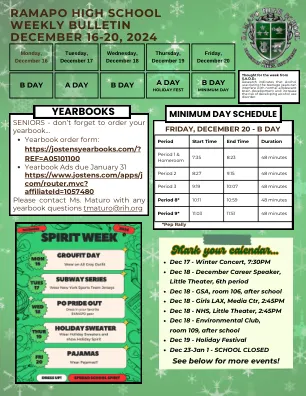
拉马波高中周报 2024 年 12 月 16 日至 20 日
年鉴订购表:https://jostensyearbooks.com/?REF=A05101100 年鉴广告截止日期为 1 月 31 日 https://www.jostens.com/apps/j com/router.mvc?affiliateId=1057480 如有任何年鉴问题,请联系 Maturo 女士 tmaturo@rih.org