XiaoMi-AI文件搜索系统
World File Search System活动识别
AI驱动的微电网促进能量弹性和...
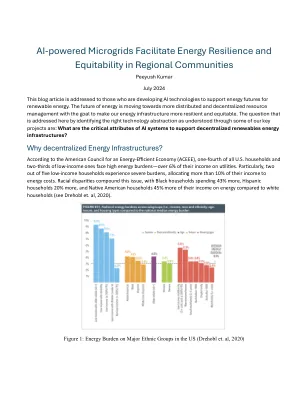
能源部门显着促进了环境污染,影响空气,水和土壤质量。作为全球空气污染的最大单一来源,该行业在2019年造成了所有二氧化碳排放量的89%(国际能源机构[IEA],2020年),推动气候变化和与空气质量差有关的健康问题。此外,化石燃料提取和加工导致通过漏油,煤矿开采径流和发电厂排放导致水污染,美国环境保护局(EPA)将这些活动识别为主要的水污染来源(EPA,2021年)。涉及重金属和有毒物质的能源部门的土壤污染会影响生态系统和农业生产率(Zeng,Li,&Yang,2019)。能源部门在温室气体排放中的作用显着影响气候变化(联合国气候变化框架公约(UNFCCC,2020)。缓解工作包括转移到可再生能源,该能源在2020年占全球发电的28%(IEA,2021年),提高了能源效率和执行更严格的环境法规。

使用人工智能的 AI 瑜伽教练
摘要:所有年龄段的人都可以从瑜伽的身心健康中受益。瑜伽姿势必须正确执行,尤其是在没有教练的情况下,以免对骨骼、肌肉和韧带造成伤害。因此,在图像处理的帮助下,使用人工智能和机器学习将有助于在没有现场教练的情况下向表演者提供反馈。所提出的系统旨在指导用户正确地执行瑜伽姿势,并在他们做错时纠正他们。以文本和音频的形式向用户提供反馈,这可以帮助练习者防止受伤,并增加练习瑜伽姿势的好处。通过从互联网上拍摄各种图像来创建不同瑜伽姿势的数据集。借助 OpenCV 和媒体管道,从网络摄像头的每个图像中找出数据点。现在将其加载到基于卷积神经网络的深度学习模型 (CNN) 中,该模型有助于识别姿势中的错误并产生错误百分比,并以文本或音频期望输出的形式向用户提供所需的反馈,其分类准确率约为 95%。关键词:实时姿势识别、瑜伽、活动识别、媒体管道和人体姿势估计

WIPO 关于知识产权 (IP) 和人工智能 (AI) 的对话
Ahmed Elgammal 博士是新泽西州立大学罗格斯大学计算机科学系的教授。Elgammal 博士是罗格斯大学计算生物医学成像与建模中心 (CBIM) 的成员,也是罗格斯大学认知科学中心 (RUCCS) 的执行委员会教员。Elgammal 博士是罗格斯大学艺术与人工智能和人体运动分析实验室 (HuMAn Lab) 的主任。他的主要研究兴趣是计算机视觉和机器学习。他的研究重点包括人类活动识别、人体运动分析、跟踪、人类身份识别和计算机视觉的统计方法。Elgammal 博士最近的研究活动还包括数字人文领域的数据科学。他于 2006 年获得美国国家科学基金会职业奖。Elgammal 博士分别于 1993 年和 1996 年获得埃及亚历山大大学计算机科学和自动控制理学学士和理学硕士学位。他分别于 2000 年和 2002 年获得马里兰大学帕克分校计算机科学理学硕士学位和博士学位。
利用药房实践中的人工智能和...
人类活动识别(HAR)是一个关键功能,其含义从医疗保健监测到安全系统。机器学习(ML)以及计算机视觉技术的最新进步在自动执行此任务方面取得了很大进展。本文对HAR系统中使用的不同ML算法和计算机视觉方法进行了详细的审查和分析。我们探讨了该领域遇到的挑战,例如人类行为的变异性,遮挡和观点变化,并研究各种方法如何减轻这些问题。此外,我们聚焦用于培训和评估的主要数据集。通过彻底的经验分析,我们评估了各种ML模型的性能,从而精确地从传感器数据或视频提要中识别人类活动。我们的观察结果肯定了深度学习框架,尤其是卷积神经网络(CNN)的有效性,在检测对HAR努力必不可少的复杂时空模式中。此外,我们探索了即将到来的趋势,持续的挑战以及在这个不断发展的地区进行研究的未来途径,强调了通过ML和计算机视觉社区共同努力继续进步的希望。

以人为本的痴呆症护理人工智能:利用强化学习在饮食场景中提供个性化干预支持
摘要。对于患有早期痴呆症 (PwD) 的人来说,记住定期进食和饮水并保持健康独立的生活可能具有挑战性。现有的智能家居技术主要侧重于活动识别,但缺乏自适应支持。这项研究通过开发受即时自适应干预 (JITAI) 概念启发的 AI 系统来解决这一差距。它适应个人行为并在家庭环境中提供个性化干预,提醒和鼓励 PwD 管理他们的饮食习惯。考虑到 PwD 的认知障碍,我们根据医疗保健理论和护理人员的见解设计了一个以人为本的人工智能系统。它采用强化学习 (RL) 技术来提供个性化干预。为了避免与 PwD 的过度互动,我们开发了一种基于 RL 的模拟协议。这使我们能够在各种模拟场景中评估不同的 RL 算法,不仅可以找到最有效和最高效的方法,还可以在实施现实世界的人类实验之前验证我们系统的稳健性。模拟实验结果证明了自适应 RL 在构建以人为本的 AI 系统方面具有良好的潜力,该系统可以感知同理心的表达,以改善痴呆症护理。为了进一步评估该系统,我们计划进行现实世界的用户研究。

使用4D BIM
人类活动识别(HAR)是机器人相互作用(PHRI)任务的机器人感知的关键成分。在施工机器人技术中,机器人对工人活动具有准确而强大的感知至关重要。这种增强的看法是在工业环境中值得信赖和安全的人类机器人协作(HRC)的基础。许多开发的HAR算法缺乏确保无缝HRC的鲁棒性和适应性。最近的作品采用了多模式方法来增加特征注意事项。本文进一步扩展了先前的研究,包括4D构建信息建模(BIM)计划数据。我们创建了一条管道,该管道将高级BIM计划活动转换为一组低级任务。框架然后将此子集用作限制HAR算法可以预测活动的解决方案空间的工具。通过通过4D BIM计划数据限制此子空间,该算法的机会更高,可以从本地化设置中较小的可能性池中预测实际可能的活动,而不是在每个点计算所有全球可能性。结果表明,所提出的方法在不利用BIM数据的情况下实现了基本模型的更高置信度预测。

用LLMS革新医疗保健
最近的作品探索了用于医疗保健中各种任务的大型语言模型(LLM),结果令人印象深刻。例如,使用Llama(大语言模型META AI)模型对医学文献进行微调,在生物医学质量检查数据集上获得了有希望的结果。LLM在公共卫生和临床任务中的其他应用涉及对几项预测任务进行电子健康记录的培训,而预培训的版本已用于心理健康分析,使用社交媒体进行情感检测。其中一些已将临床准则实施到LLM中以进行决策支持,而Chatgpt和BiomedLM已用于个性化肿瘤学。除了决策和文档外,LLM的应用包括通过问答系统,医疗聊天机器人和虚拟健康助理与患者的互动。他们甚至被应用于分析可穿戴设备的时间序列健康数据,以进行活动识别和健康监测等任务。尽管具有潜力,但LLMS还提出了有关医疗保健领域可靠性和透明度的非常重要的挑战。这些模型可能会在没有彻底验证的情况下产生不正确的医疗信息,这可能导致严重的误诊和治疗错误,通常会产生深度,推理和来源透明度的反应。
使用优化的基于通用模板的 CCA 方法控制机械臂,实现基于 SSVEP 的 BCI
最近,基于脑机接口 (BCI) 的机械臂控制系统已被用于帮助残疾人士提高无需身体运动的交互能力。然而,由于脑电图 (EEG) 信号的不稳定性以及自发脑电图活动的干扰,在三维 (3D) 空间中用机械臂执行所需任务是一项主要挑战。此外,机械手在 3D 空间中的自由运动控制是一项复杂的操作,需要更多的输出命令和更高的脑活动识别精度。基于上述内容,设计了一种基于稳态视觉诱发电位 (SSVEP) 的同步 BCI 系统,该系统具有六个刺激目标,以实现七自由度 (7-DOF) 机械臂的运动控制功能。同时,应用了一种基于模板的新型方法,该方法从不同的受试者构建优化的通用模板 (OCT),并从通用模板和多通道脑电图信号中学习空间滤波器,以提高 SSVEP 识别精度,称为基于 OCT 的典型相关分析 (OCT-CCA)。基于公开基准数据集的离线实验对比结果表明,提出的OCT-CCA方法与CCA和基于单独模板的CCA(IT-CCA)相比,检测精度显著提高,尤其是在使用较短数据长度的情况下。最后,对五名健康受试者进行了在线实验,实现了机械臂实时控制系统。结果表明,五名受试者均能独立完成控制机械臂到达三维空间指定位置的任务。

使用手腕识别基于手动的微型活动 -
摘要。零射击学习(ZSL)是一种机器学习范式,使模型能够从培训期间未遇到的类中识别和分类数据。这种方法在识别标记数据受到限制的活动方面尤其重要,允许模型通过利用所见活动的语义知识来识别新的,看不见的活动。在本文中,我们探讨了ZSL使用句子 - 伯特(S-bert)用于语义式床位和变异自动编码器(VAE)的功效,以弥合可见阶级和看不见的类之间的差距。我们的方法利用腕部惯性的惯性事件来捕获活动数据,并采用S-Bert生成偶然的嵌入,以促进可见和看不见的活动之间知识的转移。评估是在包含三个看见和三个看不见的活动类别的数据集上进行的,平均持续时间为2秒,三个看见和三个看不见的活动类别,平均持续时间为7秒。结果表明,在识别看不见的活动时表现出了有希望的表现,平均持续时间为7秒的活动的准确性为0.84,而活动的平均持续时间为0.66,平均持续时间为2秒。这突出了ZSL对增强活动识别系统的潜力,这对于在医疗保健,人类计算机互动和智能环境等领域的应用至关重要,在这些领域中,识别广泛的活动至关重要。

EnHDC:受大脑启发的超维计算的集成学习
摘要 — 集成学习是一种经典的学习方法,利用一组弱学习器组成一个强学习器,旨在提高模型的准确性。最近,受大脑启发的超维计算(HDC)成为一种新兴的计算范式,已在人类活动识别、语音识别和生物医学信号分类等各个领域取得成功。HDC 模仿大脑认知,利用具有完全分布式全息表示和(伪)随机性的高维向量(例如 10000 维)。本文首次尝试在 HDC 的背景下探索集成学习,并提出了第一个集成 HDC 模型,称为 EnHDC。EnHDC 使用基于多数投票的机制协同整合多个基础 HDC 分类器的预测结果。为了增强基分类器的多样性,我们改变了基分类器之间的编码机制、维度和数据宽度设置。通过将 EnHDC 应用于广泛的应用,结果表明,EnHDC 的准确率比单个 HDC 分类器平均提高 3.2%。此外,我们还表明,具有较低维度(例如 1000 维)的 EnHDC 可以实现与具有较高维度(例如 10000 维)的基线 HDC 相似甚至更高的准确率。这使得 HDC 模型的存储需求减少了 20%,这是在低功耗计算平台上实现 HDC 的关键。