XiaoMi-AI文件搜索系统
World File Search System济众

160 可靠性感知车辆众包感知系统...
准确地描绘路面上的坑洼不仅有助于消除安全相关顾虑并提高驾驶员的通勤效率,还可以减少交通机构不必要的维护成本。在本文中,我们提出了一种基于智能手机的系统,该系统能够精确估计坑洼的长度和深度,并介绍了坑洼数据收集、轮廓聚合以及坑洼警告和报告的整体设计。所提出的系统依靠车载智能手机的内置惯性传感器来估计坑洼轮廓,并警告驾驶员即将出现的坑洼。由于驾驶行为和车辆悬架系统的差异,构建此类系统的一个主要挑战是如何聚合来自多辆参与车辆的相互冲突的传感器报告。为了应对这一挑战,我们提出了一种新颖的可靠性感知数据聚合算法,称为可靠性自适应真相发现(RATD)。它推断每个数据源的可靠性并以无监督的方式聚合坑洼轮廓。我们的现场测试表明,所提出的系统可以有效地估计坑洼轮廓,并且与流行的数据聚合方法相比,RATD 算法显著提高了轮廓精度。
北美河流的功能性微生物组众群
预测元素周期并在增加人为影响下维持水质需要了解河流微生物组的空间驱动因素。然而,缺乏基因组分辨的功能见解和在多个河流中进行采样的理解阻碍了统治河生物地球化学的核心微生物过程。在这里,我们使用社区科学工作来加速对河流微生物组的抽样,测序和基因组分解的分析,以创建基因组解决的开放水域数据库(GROWDB)。growdb概述了覆盖美国90%的河流水域的微生物基因组的身份,分布,功能和表达。具体而言,growDB包括来自27个门的微生物谱系,其中包括来自10个家庭和128个属的新成员,并在基因组水平上定义了核心河流微生物组。growDB分析与广泛的地理空间信息相结合,揭示了微生物群落结构的本地和区域驱动因素,同时还提出了有关生态系统功能的基础假设。在先前构想的河流连续概念1上构建,我们对微生物功能性状表达进行分层,这表明河流微生物组的结构和功能是可以预见的。我们通过各种协作网络基础设施2,3提供GROWDB,以便可以在分水岭预测建模和基于微生物组的管理实践中广泛访问它。
莉隆威农业大学的第八众会众...
大学为希望提供摄影服务的个人提供专门的领域,或者在着装彩排和毕业日期间开展其他业务。与这些服务相关的费用,所有摄影师和企业主都必须向前面提到的指定帐户提交指定的费用。付款后,帐户部门将发行收据,该收据将作为整个活动的有效业务许可。费用如下:
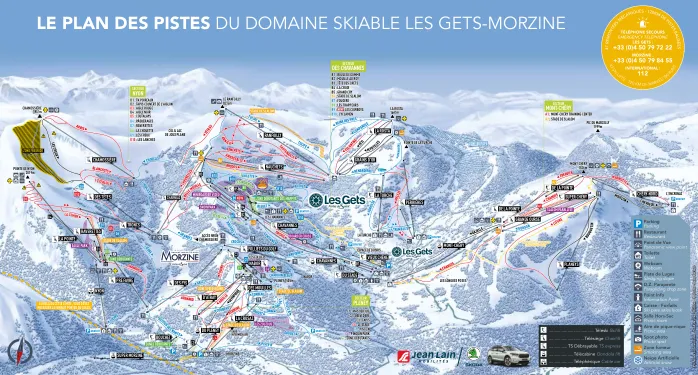
莱热-莫尔济讷滑雪场的滑雪道地图
停车场 停车场 餐厅 餐厅 观景台 全景观台 卫生间 卫生间 网络摄像头 网络摄像头 雪橇坡道 DZ 滑翔伞 滑翔伞降落区 信息点 信息点 收银台 - 滑雪通行证售票亭 野餐室 野餐区 拍照点 拍照点 吸烟区 人造雪 人造雪

人工智能时代新闻众筹的数据隐私保护
本文旨在研究人工智能时代新闻众筹中数据隐私保护问题。本文分别引用人工智能数据保护的加密算法和BP神经网络预测模型来分析人工智能时代新闻众筹中数据隐私保护问题。最后本文还结合问卷调查的方法,了解公众的隐私意识。本文的研究结果表明,人工智能可以促进个人数据意识与隐私保护,完善个人数据与隐私保护措施与方法,提高隐私与隐私保护的有效性和水平。在分析中,调查发现,男大学生对个人特质信息的认知仅为81.1%,对网络踪迹信息的认知仅为78.5%,女大学生对个人信用的认知仅为78.3%。
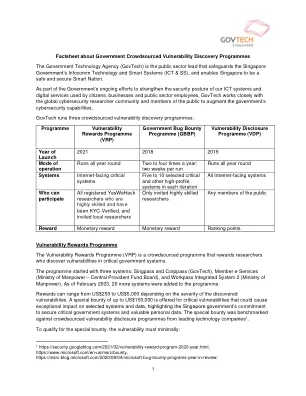
关于政府众包漏洞发现计划的事实表
奖励根据发现的漏洞的严重性,从250美元到5,000美元不等。为关键脆弱性提供了最高15万美元的特殊赏金,这些漏洞可能会对选定的系统和数据造成非凡的影响,从而强调了新加坡政府确保关键政府系统和宝贵个人数据的承诺。特别赏金针对领先技术公司的众包漏洞披露计划进行了基准测试。

突尼斯西迪布济德区域农业研究中心
联系方式:Lobna Hajji elhajjilobna@yahoo.fr 2024 年 12 月 3 日 突尼斯 Sidi Bouzid 区域农业研究中心

氟氟众胺引起的priapism:不寻常的病例报告
在我们的情况下,另一种副作用是延长的勃起。当我们查看文献时,我们没有发现由于使用氟毒素而导致的任何长时间勃起的病例。尽管与长时间勃起最相关的抗抑郁药是曲唑酮,但基本机制仍不清楚。曲唑酮被认为通过拮抗5-HT2A / 5-HT2C和α2肾上腺素能受体引起长时间的勃起和priapism(4)。氟氟众胺诱导的延长勃起可能与α受体阻滞有关。氟伏沙明与5-HT1A,5-HT2C的相互作用可以通过增加副交感神经的张力来帮助勃起,同时通过降低交感神经抑制射精(19)。在周围神经系统中,它可以通过减少交感神经排放和增加副交感神经的排放来延长勃起时间(19)。阴茎勃起被5-HT1B,5-HT1C,5-HT1D受体的刺激激活,而5-HT1A,5-HT2刺激抑制它(20)。
160 一种可靠性感知的车辆众包感知系统...
准确地描绘路面上的坑洼不仅有助于消除安全相关顾虑并提高驾驶员的通勤效率,还可以减少交通机构不必要的维护成本。在本文中,我们提出了一种基于智能手机的系统,该系统能够精确估计坑洼的长度和深度,并介绍了坑洼数据收集、轮廓聚合以及坑洼警告和报告的整体设计。所提出的系统依靠车载智能手机的内置惯性传感器来估计坑洼轮廓,并警告驾驶员即将出现的坑洼。由于驾驶行为和车辆悬架系统的差异,构建此类系统的一个主要挑战是如何聚合来自多辆参与车辆的相互冲突的传感器报告。为了应对这一挑战,我们提出了一种新颖的可靠性感知数据聚合算法,称为可靠性自适应真相发现(RATD)。它推断每个数据源的可靠性并以无监督的方式聚合坑洼轮廓。我们的现场测试表明,所提出的系统可以有效地估计坑洼轮廓,并且与流行的数据聚合方法相比,RATD 算法显著提高了轮廓绘制的准确性。