XiaoMi-AI文件搜索系统
World File Search System深植于

自动驾驶汽车:深钢筋的应用...
学生,MIT-WPU摘要本研究论文对深度强化学习在推动自动驾驶汽车的感知和决策方面推动进步方面所扮演的关键作用进行了简短的探索。通过深度学习和强化学习技术的融合,我们深入研究了这些方法如何协同促进在复杂且动态变化的环境中增强自动驾驶汽车的导航水平。重点是简化的演示文稿,本文提供了对自动驾驶汽车使用的各种感知算法的简洁而深刻的概述,强调对象检测,语义细分和基于激光雷达的技术。同时,它深入研究了深度强化学习的基本原理,阐明了这种合并在加强实时决策过程中的应用。承认简洁的约束,该论文简要介绍了关键方面,例如数据收集的复杂性和模型培训的关键作用。此外,该论文涉及自动驾驶部署固有的道德考虑,并强调了它们在塑造AI驱动运输的未来方面的重要性。从实际实施中汲取灵感,简洁地提出了案例研究,以说明自动驾驶汽车中深钢筋学习技术的切实整合,从而展示了其对增强导航能力的影响。1。浏览复杂的城市景观需要先进的技术。关键字:深度强化学习,自动驾驶汽车,感知算法,决策,导航,实时处理,深度学习,强化学习,道德考虑,案例研究。引言背景自动驾驶汽车已成为现代运输中的革命范式,承诺重塑人们和商品的移动方式。这些车辆配备了高级传感器,相机和处理单元,使它们能够在无人干预的情况下与环境进行导航和互动。但是,将自动驾驶汽车无缝整合到我们的日常生活中取决于他们准确地感知环境并实时做出迅速,明智的决定的能力。这项研究的重点是两个重要领域的融合:通过深度强化学习的视角,感知和决策。通过将深度学习的模式识别与强化学习的顺序决策技巧相结合,我们正在努力为自动驾驶汽车配备复杂的现实世界情景所需的工具。


AI(人工智能)程序和深度学习(图像识别)的研究......
学习过程按以下顺序进行: 1:理解并学习人工智能中的深度学习和机器学习 2:了解LEGO-EV3主体(组装基本机器人和创建程序) 3:了解Raspberrypi微控制器和摄像头以及基本设置 4:理解和设置JupyterLab 5:理解和学习Google TensorFlow 6:总结研究成果,制作材料并在大阪科学日上展示

从非参数方法到深神经网络
图2:NNME的神经网络结构。输入为w和y,输出是估计的回归函数f✓(x)。左绿色块是一个编码器,它由几个具有Relu激活函数的完全连接的层组成,最后一层具有线性函数;编码器的输出是提案分布的参数。右绿色块是一个解码器,它的网络结构与编码器相同;输入是x的随机样本,输出是f✓(x)的估计值。顶部的绿色块是另一个解码器,它由标准化流量的几个耦合层组成;输入是x的随机样品,输出是估计的x的先前密度。
什么是“深技术”,什么是Deep Tech Ventures?
Oihana Basilio Ruiz de Apodaca博士是Mit-Rafael Del Pino研究员(2020-2022)。她是马德里自治大学的助理教授,在那里她就与创新,知识管理和领导力社区有关的问题进行了教授和研究。她是2015年至2020年拉斐尔·德尔·皮诺基金会(Rafael del Pino Foundation)的研究和在线计划主任,此前是Celera(2014-16)的主任,是一个致力于加速西班牙年轻才华的协会。她拥有马德里自治大学的经济学和经济学和创新管理硕士学位,欧洲大学间协会的社会,科学和技术硕士学位,ISEP的硕士学位以及她成长的巴斯克大学的经济学学士学位以及经济学学士学位。
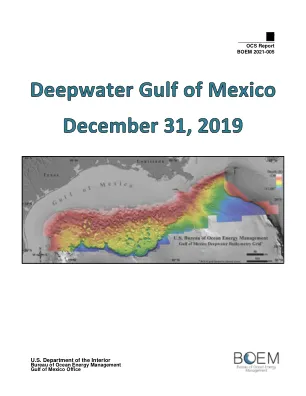
墨西哥河畔深水湾2019年。 ...
在封面上 - 墨西哥深水湾的Boem高分辨率测深图(Kramer and Shedd,2017年)。从Boem可用的3D地震清单中,使用了足够大的公共释放的地震调查,或者使用了Boem寻求并获得了所有者许可的许可。测深图是在40至3,379 m(131至11,086 ft)的水深度中的100多个最佳3D时间域调查中的镶嵌物。突出的水底反射器通常在深水中成像。3D数据的原始采集分辨率(罚款149 m 2; 1,600 ft 2)产生了约14亿个数据点(像素)。BOEM在评估浅钻危害时使用高分辨率的测深数据并确定生物学敏感性的领域。Boem的地图可用于Boem网站上的学术,行业和其他联邦机构应用程序(USDOI,BOEM,2017a)。
深空探索与开发的新时代
要实现这一愿景,需要一个有利于美国商业增长的安全国际环境。美国太空部队 (USSF) 本身并不直接参与民用太空探索和开发,其职责主要集中在组织、培训和装备所需的部队,以支持作战指挥并确保美国及其盟友和合作伙伴不受限制地进入和使用太空。然而,太空运输和物流、电力、通信、导航和太空领域意识等活动对所有太空领域(民用、国家安全和商业)都具有双重用途价值。民用和商业最佳实践的发展可以形成负责任的行为规范,从而提高所有太空活动的国际稳定性和透明度。美国国务院、国防部、商务部、交通部、能源部和国土安全部在太空探索和开发中发挥的重要支持作用是美国采取全政府方式开展太空活动的主要原因之一。

深空探索与开发的新时代
要实现这一愿景,需要一个有利于美国商业增长的安全国际环境。美国太空军 (USSF) 本身并不直接参与民用太空探索和开发,其职责重点是组织、培训和装备所需的部队,以支持作战指挥并确保美国及其盟友和合作伙伴不受限制地进入和使用太空。然而,太空运输和物流、电力、通信、导航和太空领域意识等活动对所有太空领域都具有双重用途价值,包括民用、国家安全和商业。民用和商业最佳实践的发展可以形成负责任的行为规范,从而提高所有太空活动的国际稳定性和透明度。美国国务院、国防部、商务部、交通部、能源部和国土安全部在太空探索和开发中发挥的重要支持作用是美国采取全政府方式开展太空活动的主要原因之一。

深泡探测器的几次学习
该大师项目的目的是创建一个适用于包括医学在内的图像的任意域的复杂的深击检测器。该检测器将使用在有限的深层示例中训练的神经网络开发。主要目标是设计和实施一种学习算法,该算法不仅在时间上有效,而且需要最少或不需要人类干预。该项目的一部分是创建一个新的基准,构成真实和生成的医学图像。将使用已建立的基准和项目中创建的医学图像的新基准进行比较开发的DeepFake检测器。指南:1。熟悉有关DeepFake检测的已发表工作;考虑CVPR和ICCV等突出的会议。2。审查并总结了深层检测最新方法下的核心原则。3。设计并实施了深泡检测器的一些弹药学习算法。4。创建生成和真实医学图像的基准,用于测试深冰探测器。5。验证学习算法的功能并比较其性能指标,包括检测准确性,时间效率和学习过程中所需的人类监督水平,与既定的最新方法。

“深脑刺激”的全身麻醉'
电子邮件:lara.celin@hotmail.com摘要简介:深脑刺激(ECP)是一种用于治疗高级神经退行性疾病的技术。目前,对于此过程,使用镇静剂最常用的麻醉方法是局部麻醉,因此患者保持意识。但是,患者必须中断抗帕克森药物,这会导致疼痛和心理后遗症。因此,文献讨论了全身麻醉在ECP中的使用及其可能的优势。目的:评估具有深脑刺激的手术中麻醉的不同技术。Meto Dology:这是PubMed数据库中的一项综合评论,使用描述符“麻醉和深脑刺激”,用于2019年至2024年之间发表的文章。结果:一项随机临床试验和两个荟萃分析表明,在全身麻醉和局部麻醉介导的深脑刺激之间没有临床,手术后或复杂的差异。然而,与先前发现的那些相比,一项中国随机测试带来了差异数据:接受全身麻醉的群体恢复速度更快,早期脱孔和较低的手术相关并发症和压力率较低。尽管建议在不同程度和类型的肌张力障碍中使用全身麻醉,但应经常确定麻醉方法。文献中发现的主要障碍是工作的小样本,这导致研究之间的分歧。结论:研究表明,ECP中不同的麻醉技术之间没有显着差异,最大的差异舒适地向接受全身麻醉的患者提供了舒适性。此外,已经观察到ECP也可以用于治疗导致肌肉收缩过多的疾病。关键词:麻醉,手术,神经退行性疾病,深脑刺激。摘要简介:深脑刺激(DBS)是一种用于治疗晚期神经退行性疾病的技术。目前,用于此过程的最常用的麻醉方法是局部麻醉,镇静性用途,使患者保持意识。但是,患者有必要抗药,可以抗药,并可能引起疼痛和心理后遗症。因此,在文献中讨论了DBS中全身麻醉及其可能的优势。目的:评估具有深脑刺激的手术中的不同麻醉技术。方法论:这是使用描述符“麻醉和深脑