XiaoMi-AI文件搜索系统
World File Search System湍流的

机器学习的老式框架
目的是为机器学习(ML)团队提供明确且动机的指导,该团队基于我们在经验湍流建模方面的经验。在ML外部进行建模也需要指导。mL尚未成功进行湍流建模,许多论文由于数学或物理学错误或严重过度拟合而产生了无法使用的建议。我们认为,“湍流文化”(TC)需要数年的时间来学习,而且很难传达,特别是考虑到现代缺乏仔细学习的时间;在湍流研究和建模和广泛阅读事业之后,不言而喻的重要事实很容易错过。此外,其中许多不是绝对事实,这是我们对湍流的理解以及模型与第一原理的弱连接的差距的结果。一些数学事实是严格的,但是物理方面通常不是。湍流模型令人惊讶地任意。专家之间的分歧使新进入者感到困惑。此外,通过微分方程的非平凡分析特性确定了模型的几个关键特性,这使它们无法触及纯粹数据驱动的ML型方法。最好的例子是模型在湍流区域(ETR)边缘的关键行为。我们希望在此处投放的知识可能会分为“任务”和“要求”,每个知识都结合了物理和数学。呈现了“硬”和“软”约束的明确列表。我们的重点是创建有效的产品,以增强CFD的能力,而不是出版物。首先携带了如何使用DNS数据(可能与ML结盟)的具体示例,并说明了所需的大量决策。

亚中尺度上升流细丝中的锋面不稳定性和能量耗散
基于高分辨率湍流微结构和近地表速度数据,研究了本格拉上升流系统(东南大西洋)中瞬态上升流细丝内的锋面不稳定性及其与湍流的关系。我们的研究重点是位于细丝边缘的尖锐亚中尺度锋面,其特点是持续的下锋风、强劲的锋面急流和剧烈的湍流。我们的分析揭示了三种不同的锋面稳定状态。(i)在锋面的浅侧,发现了一个 30-40 米深的湍流表面层,具有低位势涡度 (PV)。这个低位势涡度区域呈现出明确的两层结构,上层为对流(埃克曼强迫),下层为稳定分层,其中湍流由强迫对称不稳定性 (FSI) 驱动。该区域的耗散率与埃克曼浮力通量成比例,与 FSI 的最新数值模拟具有很好的定量一致性。(ii)在锋面喷射的气旋侧翼内,靠近横向锋面密度梯度的最大值,气旋涡度足够强,可以抑制 FSI。该区域的湍流是由边缘剪切不稳定性驱动的。(iii)在锋面喷射的反气旋侧翼内,混合惯性/对称不稳定性的条件得到满足。我们的数据为 FSI、惯性不稳定性和边缘剪切不稳定性与亚中尺度锋面和细丝中整体动能耗散的相关性提供了直接证据。
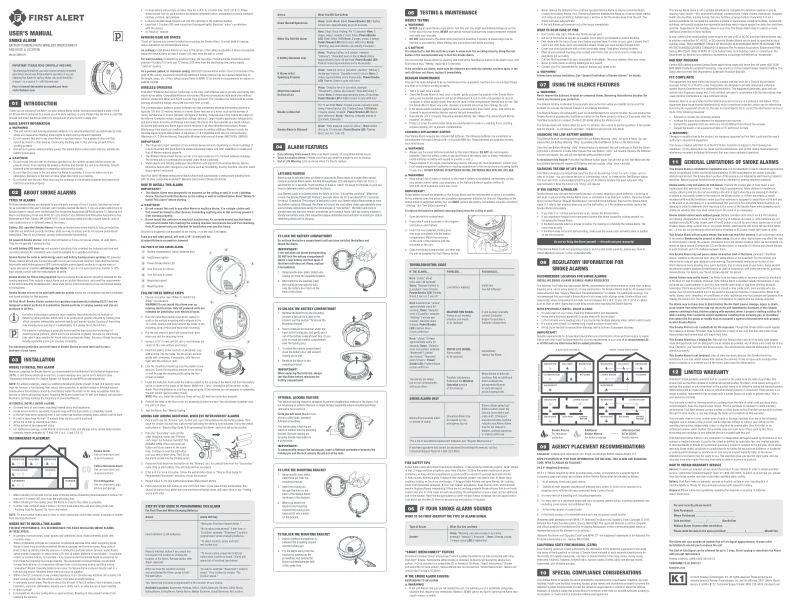
用户手册
在不安装此警报以获得最佳性能的地方,建议您避免在这些区域安装烟雾报警器:•在车库,炉房,爬行空间和未完成的阁楼中。避免极度灰尘,脏或油腻的区域。•生产燃烧颗粒的地方。燃烧时会形成燃烧颗粒。避免的区域包括通风不良的厨房,车库和炉间。(如果可能,请保持至少20英尺(6米)的单位(6米)(炉子,炉子,热水器,空间加热器)。在不可能使用20英尺(6米)距离的区域(例如,在模块化,移动或较小的房屋中),建议将烟雾报警到尽可能远离这些燃油燃料来源的地方。放置建议旨在将这些警报保持在距燃油燃料源的合理距离上,从而减少“不必要的”警报。如果将烟雾警报直接放在燃油源旁边,可能会发生不需要的警报。尽可能地通风。•在任何烹饪设备的5英尺(1.5米)内。在厨房附近的空气流中。气流可以将烹饪烟雾吸入烟雾传感器中,并引起不必要的警报。•在极度潮湿的地区。此警报应至少有10英尺(3米),距淋浴,桑拿浴室,加湿器,蒸发器,洗碗机,洗衣房,杂物间或其他高湿度来源。•在直射的阳光下。•在湍流的空气中,例如靠近吊扇或开放的窗户。吹气可能会防止烟雾到达传感器。

在...
摘要 - 从农业到公共安全的各种应用程序的普遍采用,需要了解它们所创造的空气动力学干扰。本文介绍了一个计算轻量级模型,用于估算悬停在四四个下方的诱导流量的时间平均幅度。与依赖昂贵的计算流体动力学(CFD)模拟或无人机特异性耗时的经验测量的相关方法不同,我们的方法从湍流中利用经典理论。通过分析大型运动捕获系统中不同大小的无人机的16个小时的流量数据,我们首次表明,在车辆下方的2.5无人驾驶飞机示威后,所有无人机螺旋桨的合并流都被所有无人机螺旋桨的合并被用湍流的射流良好。使用新颖的归一化和缩放,我们在实验上识别模型参数,这些参数描述了一个统一的平均速度字段,低于不同大小的四肢。模型仅需要无人机的质量,螺旋桨尺寸和无人机尺寸进行计算,可以准确地描述了远距离在非常大的体积的远距离上,这是不切实际的,以模拟使用CFD。我们的模型提供了一种实用的工具,可确保在人类附近更安全操作,从而在多代理方案中优化传感器放置和无人机控制。我们通过设计一个控制器来证明后者,该控制器可以补偿另一台无人机的向下冲洗,从而导致高度下方的高度偏差四倍。视频:https://youtu.be/-erfmxwtzps
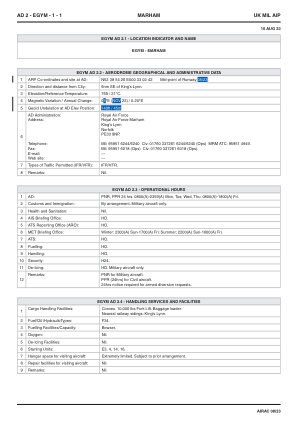
AD 2 - 埃及 - 1 - 1 英国 MIL AIP MARHAM
1.斯卡尔索普活动。所有在斯卡尔索普执行 CAS、JFAC 或空投/空投活动的 AS 均应通过 VHF 124·155 联系英国皇家空军马哈姆基地。2.填埋场。大量海鸥。以 N52 42·40 E000 28·48 为中心,半径为 0·5 海里的圆圈。SFC - 1000 英尺高程。3.接近 VL 停机坪的 F-35B 可以复飞,继续在跑道 05RH/23 以南和 01/19RH 以西飞行,直到重新进入目视飞行。4.ASMT 将在 1100-1115 之间对 NE HAS 站点位置 523858N 0003409E SFC-49m (161ft) AMSL / SFC-24m (79ft) AGL 的机场的起重机进行每周例行维护。5.Rwy 01 和 19RH 现已投入使用,并带有非标准 STOL 条带标记。6.UCCL 是 U/S。7.STOVL 配置的 F35 飞机是尾流湍流的超级类别。8.高尔夫滑行道附近的桅杆距离很近,因此只适合 F35。9.Alpha 滑行道上的高标牌影响低引擎空调(例如KC135)。低引擎大型空调不得使用滑行道。10.所有 OOH 飞机和车辆移动都必须始终在 MRE 和 Tower Freq 上进行盲目呼叫。11.高速喷气式飞机在 MRM QNH 上不得低于 1,100 英尺的高度使用 ESA,旋翼机和 CAT A 飞机不得低于 600 英尺的高度使用 ESA。12.在 OOH 平民行动期间,TRC 将不配备工作人员。

高雷诺数的广泛表征...
使用先进的光学计量技术对高雷诺数减速边界层进行广泛表征。作者:C. Cuvier 1,7 、S. Srinath 1,6 、M. Stanislas 1,6 、J. M. Foucaut 1,6 、J. P. Laval 1,7 、C. J. Kähler 2 、R. Hain 2 、S. Scharnowski 2 、A. Schröder 3 、R. Geisler 3 、J. Agocs 3 、A. Röse 3 、C. Willert 4 、J. Klinner 4 、O. Amili 5 、C. Atkinson 5 、J. Soria 5 。 1 法国里尔北部大学,FRE 3723,LML-里尔机械实验室,F- 59000 里尔,法国,2 德国慕尼黑联邦国防军大学,流体力学和空气动力学研究所,诺伊比贝格,德国,3 德国航空航天中心 (DLR),空气动力学和流动技术研究所,哥廷根,德国,4 德国航空航天中心 (DLR),推进技术研究所,科隆,德国,5 莫纳什大学,澳大利亚,6 里尔中央理工学院,F-59650 Villeneuve d’Ascq,法国 7 法国国家科学研究院,FRE 3723 -LML- 里尔机械实验室,F-59650 Villeneuve d’Ascq,法国。摘要 近几年来,对湍流边界层流动中大尺度结构的观测激发了人们进行深入的实验和数值研究。然而,部分由于缺乏足够高雷诺数的全面实验数据,我们对壁面附近湍流的理解,特别是在减速情况下的理解仍然非常有限。本论文的目的是结合多个团队的设备和技能,对大型湍流进行详细表征

隐藏的马尔可夫链和田地,在Riemannian歧管中进行观测
[1] R. J. Elliot,L。Aggoun和J.B. Moore。 隐藏的马尔可夫模型:估计和控制。 Springer Science+商业媒体,1995年。 [2] O. Capp´e,E。Moulines和T. Ryd´en。 在隐藏的马尔可夫模型中推断。 Springer Science+商业媒体,2005年。 [3] L. R. Rabiner。 关于隐藏的马尔可夫模型和语音识别中选定应用的教程。 (在语音识别中的读数中)。 Morgan Kaufmann Publishers,Inc,1990。 [4] R. Durbin,S。Eddy,A。Krogh和G. Mitchison。 生物序列分析。 剑桥大学出版社,1998年。 [5] S. Z,li。 图像分析中的马尔可夫随机字段建模。 Springer Publishing Company,2009年。 [6] A. Zare,M。Jovanovic和T. Georgiou。 湍流的颜色。 流体力学杂志,812:630–680,2017。 [7] B. Jeuris和R. Vandebril。 带有toeplitz结构块的块toeplitz矩阵的khler平均值。 SIAM关于矩阵分析和应用的杂志,37:1151–1175,2016。 [8] A. Barachant,S。Bonnet,M。Congedo和C. Jutten。 通过Riemannian几何形状进行多类脑部计算机界面分类。 IEEE生物培训工程交易,59:920–928,2012。 [9] O. Tuzel,F。Porikli和P. Meer。 通过分类的人行人进行探测。 IEEE关于模式分析和机器智能的交易,30:1713–1727,2008。 [10] S. Said,H。Hajri,L。Bombrun和B. C. Ve-Muri。 熵,2016年18月18日。B. Moore。隐藏的马尔可夫模型:估计和控制。Springer Science+商业媒体,1995年。[2] O. Capp´e,E。Moulines和T. Ryd´en。在隐藏的马尔可夫模型中推断。Springer Science+商业媒体,2005年。[3] L. R. Rabiner。关于隐藏的马尔可夫模型和语音识别中选定应用的教程。(在语音识别中的读数中)。Morgan Kaufmann Publishers,Inc,1990。[4] R. Durbin,S。Eddy,A。Krogh和G. Mitchison。生物序列分析。剑桥大学出版社,1998年。[5] S. Z,li。图像分析中的马尔可夫随机字段建模。Springer Publishing Company,2009年。[6] A. Zare,M。Jovanovic和T. Georgiou。湍流的颜色。流体力学杂志,812:630–680,2017。[7] B. Jeuris和R. Vandebril。带有toeplitz结构块的块toeplitz矩阵的khler平均值。SIAM关于矩阵分析和应用的杂志,37:1151–1175,2016。[8] A. Barachant,S。Bonnet,M。Congedo和C. Jutten。通过Riemannian几何形状进行多类脑部计算机界面分类。IEEE生物培训工程交易,59:920–928,2012。[9] O. Tuzel,F。Porikli和P. Meer。通过分类的人行人进行探测。IEEE关于模式分析和机器智能的交易,30:1713–1727,2008。[10] S. Said,H。Hajri,L。Bombrun和B. C. Ve-Muri。熵,2016年18月18日。Riemannian对称空间上的高斯分布:结构化协方差矩阵的统计学习。信息理论交易,64:752–772,2018。[11] E. Chevallier,T。Hose,F。Barbaresco和J. Angulo。对Siegel空间的内核密度估计,并应用于雷达处理。[12] A. Banerjee,I。Dhillon,J。Ghosh和S. Sra。使用Von Mises-Fisher分布在单位过度上进行促进。机器学习研究杂志,6:1345–1382,2005。
149 公里路径上的光学湍流测量
摘要。使用数码相机和发光二极管 (LED) 信标进行了一项实验,研究了莫纳罗亚山和哈莱阿卡拉山之间 149 公里路径上的湍流。大部分路径都在海洋上,路径的一大部分位于海平面以上 3 公里。在莫纳罗亚山一侧,六个 LED 信标以大致线性阵列放置,每对间距为 7 至 62 米。从哈莱阿卡拉山一侧,一对相距 83.8 厘米的相机观察了这些信标。沿路径的湍流会引起波前倾斜,从而导致图像中的 LED 点发生位移。图像运动是由不必要的噪声源(例如相机平台运动)引起的。点之间的差分运动抵消了大部分噪声,并且这种差分运动会根据源和相机之间的几何形状以不同的方式受到沿路径湍流的加权。开发了一种相机运动不敏感的加权函数来处理这个观察问题。然后使用这些加权函数的线性组合来生成复合加权函数,该函数可以更好地抑制源和接收器附近的湍流,并且对路径越过海洋部分的湍流最为敏感。该技术用于估计此区域的湍流。所涉及的长距离导致图像中出现非常强烈的闪烁,这给数据处理带来了新的挑战。对 C 2 n 的结果估计为 4 × 10 − 17 m − 2 ∕ 3,与 Hufnagel – Valley HV5/7 模型和数值天气建模的结果高度一致。© 作者。由 SPIE 根据 Creative Commons Attribution 4.0 Unported 许可证发布。分发或复制本作品的全部或部分内容需要完全署名原始出版物,包括其 DOI。[DOI:10.1117/1.OE.59.8.081806]

星系团中的湍流压力支撑
背景。星系团中的湍流压力大小仍存在争议,特别是与动态状态和用于模拟的流体力学方法的影响有关。目的。我们研究大质量星系团内介质中的湍流压力分数。我们旨在了解流体动力学方案、分析方法和动态状态对宇宙学模拟中星系团最终特性的影响。方法。我们使用无网格有限质量 (MFM) 和光滑粒子流体动力学 (SPH) 对七个星系团的一组放大区域进行了非辐射模拟。我们使用了三种不同的分析方法,基于:(i) 偏离流体静力平衡,(ii) 通过亥姆霍兹-霍奇分解获得的螺线管速度分量,以及 (iii) 通过多尺度滤波方法获得的小尺度速度。我们将模拟星团样本分为活跃星团和松弛星团。结果。我们的模拟预测,与松弛星团相比,活跃星团的湍流压力分数会增加。这在基于速度的方法中尤其明显。对于这些方法,我们还发现 MFM 模拟的湍流比 SPH 模拟的湍流增加,这与更理想化的模拟的结果一致。预测的非热压力分数在星团中心内为几个百分点(松弛星团)和约 13%(活跃星团)之间变化,并向外围增加。没有看到明显的红移趋势。结论。我们的分析定量评估了流体动力学方案和分析方法在确定非热或湍流压力分数方面的重要性。虽然我们的设置相对简单(非辐射运行),但我们的模拟与之前更理想的模拟一致,并且代表着对湍流的理解更近了一步。

通过剪切和湍流环境中的剪切和波动调节生物膜生长
这项工作研究了剪切和湍流对多物种生物膜增长的作用。这项研究主要是通过了解海洋环境中的微塑料(MPS)的生物污染而激发的。通过增加颗粒粘性,生物膜促进MP聚集和下沉;因此,对这一多规模过程的透彻理解对于改善MPS命运的预测至关重要。我们使用振荡网格系统进行了一系列实验室实验,以在均质各向同性湍流下促进小型塑料表面上的生物膜生长,而网格雷诺数在305和2220之间。分析了两种配置:一种塑料样品与网格一起移动(剪切为主导),另一个将样品保持在网格下游固定,因此经历了湍流,但没有平均流(无剪切)。生物膜在所有情况下在几天的时间范围内形成,然后仔细测量和分析塑料碎片上形成的生物量作为湍流水平的函数。使用简约的物理模型进一步解释了无剪切结果,并将生物膜(单动力学)内的养分吸收率与周围散装液体的湍流扩散。结果表明:(i)在剪切主导的条件下,生物膜质量最初在腐烂之前以湍流强度生长,这可能是由于剪切引起的侵蚀; (ii)在无剪切实验中,质量在养分的可用性增强后单调增加,然后由于摄取受限的动力学而饱和。后一种行为由物理模型很好地再现。此外,用扫描电子显微镜分析了塑料片的子集,表明湍流还会影响生物纤维簇的显微镜结合,随着湍流的振幅增加,它们的紧凑性增加了。这些结果不仅有助于我们对流量下生物膜的基本理解,而且还可以为海洋环境中MP运输的全球模型提供信息。