XiaoMi-AI文件搜索系统
World File Search System湍流

模拟无湍流量子增强干涉望远镜
望远镜系统的角分辨率受限于相干孔径的大小,孔径越大,角分辨率越精细。这可以通过制造更大的望远镜来实现,或者通过组合多个望远镜阵列来模拟更大的望远镜。后者允许用户在探测器之间创建非常长的基线,而无需使用单个的大型探测系统;使用甚长基线干涉测量法 (VLBI) 的望远镜系统已经能够获得更高质量的天文物体图像。然而,直接探测 VLBI 对于较高频率的光子(例如可见光子)来说更加困难,因为这些波长在光纤中的传输损耗较大,并且无法直接记录光频率的电场(与射电望远镜相比,射电望远镜的信号可以先以电子方式记录,然后像事件视界望远镜 [ 1 ] 一样进行“干涉”)。 Gottesman、Jennewein 和 Croke 提出通过检测望远镜之间的相关性来规避这一限制,每个望远镜都由一个天文光子和一个地面光子的叠加组成(望远镜之间的相对相位可控)[2]。本质上,这两个过程之间存在量子力学的双光子干涉,其中天文光子进入一个望远镜,地面光子进入另一个望远镜,反之亦然。干涉可见度作为望远镜基线分离的函数的变化决定了两个望远镜处光源的相互相干性,进而通过范西特-泽尔尼克定理,人们可以确定光源的强度分布[3]。在这里,我们使用来自自发参量下转换(SPDC)的光子进行了原理验证演示。

激光等离子体中的时间分辨湍流
牛津大学牛津大学牛津大学3PU的物理系; B普林斯顿大学,新泽西州普林斯顿大学天体物理科学系; 08544; C芝加哥大学天文学与天体物理学系,芝加哥,伊利诺伊州60637; D 14627年罗切斯特大学物理与天文学系; Rochester Univers,Rochester,纽约州罗切斯特大学激光Energetics E实验室; 14623年; F英国贝尔法斯特皇后大学贝尔法斯特皇后大学数学与物理学学院; G Central Laser设施,卢瑟福·阿普尔顿实验室,DIDCOT OX11 0QX,英国; h英国格拉斯哥G4 0NG的Strathclyde大学物理系;我的等离子科学与融合中心,马萨诸塞州剑桥,马萨诸塞州02139; J Argonne National Laboratory,Argonne,伊利诺伊州60439年Argonne National Laboratory J数学和计算机科学部; k Laboratoire pour l'iperized des laser Intenses,CNR,COMSARIAT``a l'' l日本大阪苏瓦大学大阪大学工程研究生院; M Lawrence Livermore国家实验室,Livermore,CA 94550; n理论Astrophysikalischer等离子体Forschungsgruppe,Max-Planck-institut f ur kernphysik,69029 Heidelberg,德国; o乌尔山国家科学技术研究所,乌尔桑44919,乌尔桑国家科学学院物理学系;内华达大学里诺大学的物理系89557
149 公里路径上的光学湍流测量
摘要。使用数码相机和发光二极管 (LED) 信标进行了一项实验,研究了莫纳罗亚山和哈莱阿卡拉山之间 149 公里路径上的湍流。大部分路径都在海洋上,路径的一大部分位于海平面以上 3 公里。在莫纳罗亚山一侧,六个 LED 信标以大致线性阵列放置,每对间距为 7 至 62 米。从哈莱阿卡拉山一侧,一对相距 83.8 厘米的相机观察了这些信标。沿路径的湍流会引起波前倾斜,从而导致图像中的 LED 点发生位移。图像运动是由不必要的噪声源(例如相机平台运动)引起的。点之间的差分运动抵消了大部分噪声,并且这种差分运动会根据源和相机之间的几何形状以不同的方式受到沿路径湍流的加权。开发了一种相机运动不敏感的加权函数来处理这个观察问题。然后使用这些加权函数的线性组合来生成复合加权函数,该函数可以更好地抑制源和接收器附近的湍流,并且对路径越过海洋部分的湍流最为敏感。该技术用于估计此区域的湍流。所涉及的长距离导致图像中出现非常强烈的闪烁,这给数据处理带来了新的挑战。对 C 2 n 的结果估计为 4 × 10 − 17 m − 2 ∕ 3,与 Hufnagel – Valley HV5/7 模型和数值天气建模的结果高度一致。© 作者。由 SPIE 根据 Creative Commons Attribution 4.0 Unported 许可证发布。分发或复制本作品的全部或部分内容需要完全署名原始出版物,包括其 DOI。[DOI:10.1117/1.OE.59.8.081806]

从机器学习预测的马赛克运动中的表面湍流
极地地区,尤其是北极地区,处于气候危机的前线。近几十年来,北极的表面变暖速率比全球平均值(Rantanen等,2022)高两到四倍,这是一种称为北极扩增的现象(例如Graversen等,2008; Serreze&Barry; Serreze&Barry,2011; Serreze&Francis&Francis&Francis&Francis,2006)。随着温度升高而在北极海冰的厚度和范围内发生了约50%的损失(Gascard等,2019)。未来几十年的北极海冰损失率仍然高度不确定(Bonan,Lehner,&Holland,2021; Bonan,Schneider等,2021),但是后果预计将是严重的:对于本地生态系统而言(Kovacs等,2011; Post等,2013; Post et al。,2013; Tynan,2015; Tynan,2015; Tynan,2015);对于土著人民(Meier等,2014);而且,对于低纬度气候,可能(Cohen等,2014,2020; Jung等,2015; Liu等,2022)。海冰与大气之间的热交是北极扩增的主要驱动力(例如,Lesins等,2012; Previdi等,2021; Serreze等,2009),并确定海冰融化速率(例如Rothrock等人,Rothrock等,1999; Screen&Screen&Screen&Screen Mondss,2010)。
湍流触摸:驾驶舱飞行显示器的触摸屏输入
摘要 商用飞机驾驶舱中的触摸屏输入具有潜在优势,包括易于使用、可修改和减轻重量。但是,对湍流的耐受性是其部署的挑战。为了更好地了解湍流对驾驶舱输入方法的影响,我们对三种输入方法的用户性能进行了比较研究——触摸、轨迹球(目前在商用飞机中使用)和旨在帮助手指稳定的触摸屏模板覆盖。在各种交互式任务和三个模拟湍流级别(无、低和高)下比较了这些输入方法。结果表明,随着振动的增加,性能下降,主观工作量增加。当精度要求较低(在所有振动下)时,基于触摸的交互比轨迹球更快,但对于更精确的指向,尤其是在高振动下,它的速度较慢且准确性较低。模板并没有改善触摸选择时间,尽管它确实减少了高振动下小目标的错误,但只有当手指抬起错误通过超时消除时才会发生这种情况。我们的工作提供了有关受湍流影响的任务类型以及在不同振动水平下表现最佳的输入机制的新信息。

有限体积湍流中的能量通量波动
人们对远离平衡的系统中的整体空间平均涨落有浓厚的兴趣 1-4 ,其中流体湍流提供了一个引人注目的例子 5,6 。三维 3D 湍流的一个基本方面是能量从大尺度到小尺度的级联,随后在最小尺度上耗散。表征能量通量对于湍流建模尤为重要。众所周知,局部能量耗散率波动很大 6 。这项工作研究了从大尺度到小尺度的能量通量,在有限范围的局部区域内取平均值。如果系统处于稳定状态,则流体 B 中典型大小为 R 的子体积上的能量通量的空间平均值可简单地由耗散动能的速率给出。在这种情况下,通量必然为正,并从大尺度流向小尺度。然而,这种通量随时间的变化可能非常显著。事实上,已经多次证明,能量可以从小尺度向大尺度散射,导致能量通量为负值 7,8 。很自然地,可以预见这种影响应该取决于所研究子系统的尺度。这项工作的目标之一是量化在流动子域上测量的能量通量的波动,特别是它对子域大小的依赖性。在局部各向同性条件下,整体平均能量耗散率 ¯ 与给定尺度下纵向速度差的三阶矩 r 有关,

中层大气中的湍流参数 - AMS 期刊
摘要:我们对大气流动的分层湍流和小尺度湍流状态进行了尺度分析,重点关注中间层。我们区分了旋转分层宏观湍流 (SMT)、分层湍流 (ST) 和小尺度各向同性 Kolmogorov 湍流 (KT),并指定了这些状态的长度和时间尺度以及特征速度。结果表明,浮力尺度 (L b ) 和 Ozmidov 尺度 (L o ) 是描述从 SMT 到 KT 的转变的主要参数。我们采用浮力雷诺数和水平弗劳德数来表征中间层的 ST 和 KT。该理论应用于高分辨率大气环流模型的模拟结果,该模型采用 Smagorinsky 型湍流扩散方案进行亚网格尺度参数化。该模型使我们能够推导出 KT 状态下的湍流均方根 (rms) 速度。我们发现湍流 RMS 速度在夏季有一个最大值,在冬季有两个最大值。冬季 MLT 中的第二个最大值与二次重力波破碎现象有关。该模型的湍流 rms 速度结果与基于 MF 雷达测量的完全相关分析非常吻合。提出了一种基于中尺度直接能量级联思想的中尺度水平速度新尺度。后者对中尺度和小尺度特征速度的发现支持了本研究提出的观点,即中尺度和小尺度中间层动力学在统计平均值上受 SMT、ST 和 KT 控制。
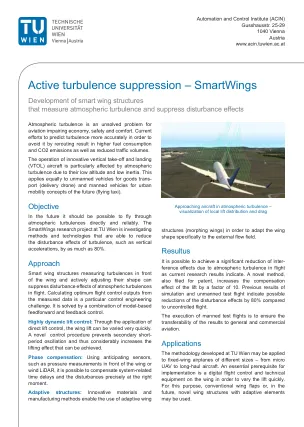
主动湍流抑制 – SmartWings - 维也纳技术大学
目前的研究结果表明,飞行过程中大气湍流造成的干扰效应可以显著减少。一种新方法(也已申请专利)可将升力补偿效应提高 10 倍。先前的模拟和无人驾驶试飞结果表明,与无控制飞行相比,干扰效应可能减少 80%。

美国尾流湍流重新分类的发展(特邀)
本文介绍了背景信息,并提供了联邦航空管理局 (FAA) 尾流湍流计划 RECAT(即重新分类)特定方面的状态更新。RECAT 的基本前提是,可以使用更完整的尾流相关参数集来改进尾流分离,而不是使用基于最大起飞重量的现有 FAA Order JO 7110.65 分类尾流湍流分离最小值。然后,此过程可以安全地降低尾流湍流分离最小值,使其低于 FAA Order JO 7110.65 中规定的最小值。本文介绍了 RECAT 的整体三阶段方法,最终目标是实现动态成对分离。目前,第二阶段或基于静态成对的尾流湍流分离已准备好由联邦航空管理局实施。本文介绍了分析方法,包括 RECAT 第二阶段开发中使用的数据源和严重程度指标。
湍流触摸:驾驶舱飞行显示器的触摸屏输入
摘要 商用飞机驾驶舱中的触摸屏输入具有潜在优势,包括易于使用、可修改和减轻重量。然而,对湍流的耐受性是其部署的挑战。为了更好地了解湍流对驾驶舱输入方法的影响,我们对三种输入方法的用户性能进行了比较研究——触摸、轨迹球(目前在商用飞机中使用)和旨在帮助手指稳定的触摸屏模板覆盖。在各种交互式任务和三种模拟湍流水平(无、低和高)下比较了这些输入方法。结果表明,随着振动的增加,性能下降,主观工作量增加。当精度要求较低时(在所有振动下),基于触摸的交互比轨迹球更快,但对于更精确的指向,尤其是在高振动下,它更慢且更不准确。模板没有改善触摸选择时间,尽管它确实减少了高振动下小目标的错误,但只有当手指抬起错误通过超时消除时才会发生。我们的工作为受湍流影响的任务类型以及在不同振动水平下表现最佳的输入机制提供了新的信息。