XiaoMi-AI文件搜索系统
World File Search System源线

手电筒装置、电源装置
3 天前 — 主题、规格或标准单位数量执行截止日期|履行地点。06-1-2373-8200-0012-00 ... (4) 防卫省卫生督察、大臣官房、防卫政策局局长、防卫装备局局长(以下简称“有权暂停部长提名的人”)...
μSR 实验进展与缪子源发展趋势*
(c)浸入量子自旋液体中的磁液滴[15]; (d)磁电材料表面上方的单个电荷,Cr 2 O 3,诱导表面下方的图像单极,然后图像单子在表面上方产生理想的单极磁场[20]。
Hangzhou Jiuyuan Gene Engineering Co.,Ltd。杭州九源... 2023环境社会和治理报告 AIM疫苗有限公司AIM疫苗有限公司艾美疫苗股份有限公司 年度的年度业绩公告... AIM疫苗有限公司AIM疫苗有限公司艾美疫苗股份有限公司 远大医药集团有限公司 电子商品控股有限公司
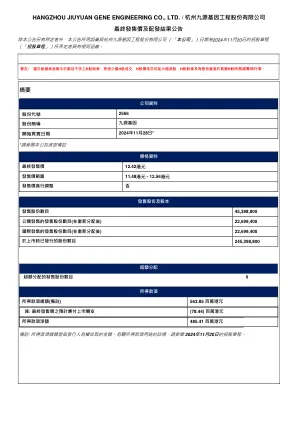
于临时股东大会日期,245,398,800股,包括,包括136,302,015股非上市股份及109,096,785股h股。于临时股东大会日期,(i)(i)本公司概无持有库存股份(包括持有或存置于由香港中央结算有限公司建立及运作的中央结算及交收系统的任何库存股份),因此于临时股东大会上并无库因此于临时股东大会上并无库(I),因此于临时股东大会上并无库因此于临时股东大会上并无库(ii)(ii)本公司概无购回待注销之股份。出席临时股东大140,027,027,52525252525252525252525252525252525252525252525252525252525252525.0.0.0.06%6%6%。
Hangzhou Jiuyuan Gene Engineering Co.,Ltd。杭州九源...Hangzhou Jiuyuan Gene Engineering Co.,Ltd。杭州九源...
在EGM之日,有权参加EGM提议的决议的股份和股份总数为245,398,800,其中包括136,302,015股份,其中包括136,302,015股股份和109,096,096,785小时。在EGM之日起,(i)公司没有持有的财政部股份(包括由香港证券清算公司建立和运营的中央清算和和解系统持有或存放的任何财政部股票),因此没有在EGM上行使财政部股票的投票权; (ii)没有公司回购待定的股票。股东的数量和授权的代理人参加了EGM。股东和授权的代理人持有140,027,525股股票,占EGM,约占具有投票权的已发行股票总数的57.06%。

Hangzhou Jiuyuan Gene Engineering Co.,Ltd。杭州九源... CSPC制药集团有限公司 年度报告
(4)股东须以书面形式委任代表,代表委任表格由股东或由其以书面正式授权的代理人签,代表委任表格应加盖公司印章或由其董事或以书面形式正式授权的,代表委任表格应加盖公司印章或由其董事或以书面形式正式授权的,则授权书或其他授权文件必须经公24小时前(即不迟于2025年3月4上午九时正前(香港时间)((())(())将上述文件送达h股证券登记处香港中央证券登h股证券登记处香港中央证券登173号合和中心17m楼)

10、11号楼应急电源改造工程
2024年9月17日 - 8 文件程序。建筑工程所需的申请和文件必须按照政府规定的标准格式准备和提交。 9 保密。未经监理人员许可,不得泄露施工期间获得的任何信息。

冈山大学资源植物科学研究所报告
植物压力的研究核心科学大气压力单元植物光适应研究小组1组环境反应系统2功能性生物分子发现组组3土壤应力单位植物应力生理4植物分子生理学组分子生理学5生物应力单元组的植物 - 微生物相互作用6组植物 - 内部相互作用7植物免疫设计组8植物环境微生物学9大麦和野生植物资源中心遗传资源遗传资源单位遗传资源组基因组多样性10应用基因组学单位遗传资源和功能组11综合基因组育种12
00E250330826战争1..1
公众持股量,本公司已发⾏股本总额约,本公司已发⾏股本总额约28.44%将计算在公众持股量内,符合上市规则第,8.08条规定的最低百分比。,(i),紧随全球发售后,概无承配⼈将单独获配售本公司经扩⼤已发⾏股本10%以上;(ii)于上市后,除和达香港及杭⾦投,除和达香港及杭⾦投,共29,829,738 股股份(相当于我们的已发⾏股本总数约12.1616%)市时并无持有公众⼈⼠所持h股50%以上,符合上市规则第8.08(3)条及第8.24条的规定;及(iv)上市时至少有300名股东,符合上市8.08(2)8.08(2)条规定。条规定。开始买卖情况下,h股股票⽅会于香港时间2024年11⽉11⽉28⽇(星期四) (⽇(星期 ⽇(星期)上午九时正在联交所开始买卖。H股将以每手200股h股进⾏买卖。h股进⾏买卖。h股进⾏买卖。2566。