XiaoMi-AI文件搜索系统
World File Search System滑动
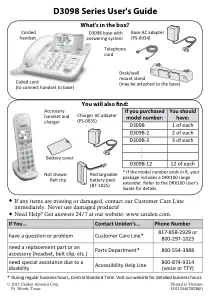
D3098 系列用户指南 - uniden.info
安装和给电池充电 1. 打开所有听筒、电池组和电池盖的包装。如果任何听筒已安装电池盖,请按下凹口并将盖子向下滑动并取下。 2. 将电池组连接器与听筒内的插孔对齐。(电池连接器只能以一种方式插入。) 3. 推入电池组连接器,直到其咔嗒一声到位。轻轻拉电线,确保电池组已牢固连接。 4. 放上电池盖并将其向上滑动到位。 5. 使用交流适配器将每个充电器上的电源插孔连接到普通室内(120V AC)电源插座。 6. 将每部听筒放入充电器中,显示屏朝前。如果电池图标没有开始循环显示各个电量,请重新安装听筒或将充电器连接到不同的插座。# # 在使用所有听筒之前,请先将其充满电(大约 15 小时)。测试连接 拿起每部听筒,然后按 Talk/FLASH。您应该听到拨号音,并且显示屏上应该显示 Talk 。 (再次按 Talk/FLASH 或 END/CLEAR 挂断电话。)如果有噪音或静电干扰,请参阅第 25 页的“线路上有很多噪音或静电干扰”,了解避免干扰的提示。

升降推拉门
Quantum 升降滑动门是一种流行的大开门样式。只需一个杠杆和轮子,门板便可从门槛上抬起,远离密封条,从而轻松实现移动。重达 880 磅的门也可以轻松操作。与传统推拉门相比,升降滑动门系统具有三大显著优势。门在两个多轮滑架上运行,旨在提供最大支撑和令人难以置信的平稳移动。当门处于锁定位置时,卓越的密封功能将发挥作用。顶部、底部和侧面的双重密封实际上会随着门尺寸的增加而变得更紧密。升降滑动门由门槛支撑,设计为比其他推拉门选项更能抵抗空气和水的渗透。多个可操作门板相互滑动和重叠,可打开非常宽的空间。可操作滑动面板与固定面板相结合,可实现大量尺寸和配置可能性,包括无柱转角单元。在更需要包覆产品的应用中,我们已将 Quantum Clad 添加到我们的门选项列表中。请咨询您的 Quantum 代表,了解可用的样式、颜色和价格。

和电热膜蒸馏
摘要 - 有效而准确的3D对象形状重新构造显着贡献了机器人与环境的物理相互作用的成功。获取有关未知物体的准确形状信息具有挑战性,尤其是在非结构化环境中,例如视觉传感器可能只能提供部分视图。为了解决此问题,可以使用触觉传感器来提取本地表面信息,以进行更健壮的未知对象形状估计。在本文中,我们提出了一种新颖的方法,用于使用配备有触觉传感器的多指手工探索和重建的有效未知的3D对象探索和重建方法,并且仅提供部分视图。我们提出了一种多手指滑动触摸策略,以使用贝叶斯优化方法和单个领导者多手指的局部表面感知来有效地探索形状探索。我们通过基于仿真和实际机器人实验估算来自YCB和OCRTOC数据集的对象的3D形状来评估我们提出的方法。所提出的方法得出成功的重建结果,仅取决于几个连续的滑动触摸。实验结果表明,我们的方法能够以有效而准确的方式对未知对象进行建模。
paramyxoviral磷酸蛋白基因中共转录编辑的进化史
paramyxoviruses的磷蛋白基因编码多种蛋白质产物。P,V和W蛋白是通过转录滑动产生的。此过程导致在保守的编辑位点将未模拟的鸟苷核苷插入mRNA中。p蛋白是病毒RNA聚合酶的重要组成部分,并且由大多数帕糖病毒中的基因的直接副本编码。但是,在某些情况下,非必需的V蛋白默认编码,并且必须将鸟氨酸插入mRNA中以编码P。插入的鸟氨酸的数量可以通过病毒之间变化的概率分布来描述。在本文中,我们回顾了这些分布的性质,这些分布可以从mRNA测序数据中推断出来,并重建了paramyxovirus家族中共转录编辑的进化历史。我们的模型表明,在整个家庭的已知历史中,系统已从P默认值转换为V默认模式四次。编辑系统的完全丢失已经发生了两次,V蛋白的典型锌纤维结构域已被删除或再次突变两次,W蛋白已经独立演变了三次新型功能。最后,我们通过病毒RNA聚合酶的滑动来回顾共转录编辑的物理机制。
10个最佳老年人的大脑游戏,可以改善记忆力和心理健康
1。设备可能无法检测到所有跌倒。无法检测到的跌倒可能包括慢速跌落,从低处跌落和坐姿的滑动。如果可以的话,用户在需要帮助时应始终按下按钮。2。GOSAFE覆盖范围在房屋外部和无线服务的房屋中,并提供了适用的第三方无线网络对/覆盖范围的范围。某些限制受第三方蜂窝提供者的可用性和覆盖范围。信号范围可能会有所不同。

使用
摘要 - 本文将着重于自动驾驶汽车中的自适应巡航控制。自适应巡航控制输入是安全距离,该安全距离取决于距离值,测量距离,自动驾驶汽车本身的纵向速度,输出是所需的加速度。目标是根据超声波传感器测量的距离跟随前面的车辆,并保持前方车辆之间的距离大于我们确定的安全距离。为此,我们使用了基于适用于自适应巡航控制系统的神经网络,使用了超级扭曲滑动模式控制器(STSMC)和非单明的终端滑动模式控制器(NTSMC)。神经网络能够近似于NTSMC控制器的指数达到法律项参数,以补偿不确定性和扰动。使用超声波传感器生产并测试了一个自主汽车自适应巡航控制系统原型,以测量两家汽车之间的距离,而Arduino板作为微控制器,以实施我们的程序,并将四个DCS Motors作为执行器作为执行器,以移动或停止我们的主机车辆。该系统由代码和Simulink Matlab处理,这些控制器的效率和鲁棒性非常好,如低纵向速度误差值所证明的那样。使用基于神经网络控制器的STSMC和NTSMC改善自适应巡航控制,可以提高自动驾驶汽车的安全性,这些神经网络控制器的效率和鲁棒性选择。

葡萄园中的微生物群生态系统服务
有机涂层的耐用性提高可以部分解决金属腐蚀的重要问题。出于这个原因,这项工作试图在吉他上使用粉末有机涂层(尤其是钙离子交换的二氧化硅微粒)后生产粉末有机涂层。目的是获得具有更好耐腐蚀性的高性能涂料,并使其对磨蚀性和侵蚀性磨损具有更大的抵抗力,以减少暴露期间遭受损害的可能性。原始环氧涂层和涂料具有不同的特性,具有两个不同百分比的钙离子交换二氧化硅抑制剂(1和2%的wt。)进行了分析。在执行受控机械损伤后评估了新有机涂层的腐蚀保护。使用扫描开尔文探针(SKP)测量每种涂层所遭受的分层,在添加3.5%的NaCl下降后,持续了26天。此外,还研究了所有有机涂层的抗刮擦性,通用硬度和耐磨性(滑动和侵蚀性),以评估添加剂对其机械性能的影响。这项工作中获得的结果表明,这些抑制剂的少量添加能够从缺陷中降低涂层的分层速率,并在浸入NaCl溶液中后改善了刮擦测试的结果。此外,在环氧树脂中添加2%二氧化硅颗粒改善涂层的侵蚀性和滑动磨损性能。
2024-25牛津餐饮计划
进入任何校园用餐地点时,要求客人洗手;所有餐饮设施中都有无触摸的洗手液站。面具目前在牛津餐厅内是可选的。如果健康指标发生变化,或者出现了增加的风险,则可能会恢复室内掩盖要求。任何需要或喜欢戴口罩的人都可以这样做。请访问Emoryforward屏蔽页面,以获取Emory最新的掩盖策略。请访问Emoryforward网站,以获取有关Emory响应的最新信息。计划条款所有2024-2025牛津大学进餐计划从2024年8月17日(星期五)上午11点开始,并于2025年5月10日(星期六)午餐后结束。请参阅本协议末尾的用餐日历。住宅用餐计划在正常运营期间可通往牛津咖啡馆(住宅用餐厅)。dooley美元是为方便的,旨在在牛津的零售地点(Oxpresso and ofk)使用,用于弹出体验,例如星期五晚上的叮咬和穆迪星期一的星期一,以及在Quad上的Cue等特殊活动中使用。可以在本学期的任何时候添加其他Dooley美元。就餐计划是免税的。因此,它们是不可转让的,仅适用于计划持有人。任何欺诈性地使用另一位学生的膳食会员资格的尝试都将对各方采取纪律处分。如果设施开放,则在休息期间接受dooley美元。所有牛津用餐地点的用餐日历,设施时间和菜单应发布在Emory Oxford Bon Appetit网站上https://emoryoxford.cafebonappetit.com/当通常关闭居留大厅时,就餐计划不涵盖假期或破坏。用餐不是特定于用餐期,但是,有一个无限餐计划的学生一次只能使用一(1)个餐清扫,并且必须在两次滑动之间等待至少一(1)小时。对于牛津计划A,您的计划包括四个来宾通往牛津咖啡馆(住宅用餐厅)。您必须通知收银员您想使用客人滑动。在OFK,Oxpresso或特殊事件中,客人的滑动无效。计划B,C和D不包括客人通行证。可以将额外的餐点刷用于客人,但是,您需要在刷卡之前通知收银员。对于所有计划,就餐计划周将于周五上午12:00开始,直到星期四11:59 pm。未使用的饮食将在每个学期结束时到期。仅对于牛津计划D,将在秋季学期结束时留下的剩余的餐厅参赛作品/餐点,将添加到您在春季收到的滑动中。未使用的餐点在每个学年结束时到期。每个学期都向学生的作品帐户收取所有膳食计划费用。秋季学期的进餐计划成本将于8月提交给学生金融服务;春季学期的进餐计划成本于12月提交。整个学年的进餐计划合同仍在生效。dooley美元EmoryUniversity保留随时更改本协议条款的权利,恕不另行通知。

Pocket RVT - AeroVironment, Inc.
设计的简单性 简单和易用是 Pocket RVT 的主要特点。由于没有外部按钮需要解读,Pocket RVT 完全通过我们易于使用的应用程序进行控制。通过直观的多点触控手势进行滑动、缩放和平移,更改频道、平台或在显示设备上导航图像从未如此简单。使用 Pocket RVT,您可以接收所需的所有信息,而无需背负沉重的视频设备和电池。
学术直播项目2024-25
GAO优化的基于网格的步长尺寸PB&O MPPT控制器具有网格集成EV充电站的目标:该项目的主要目的是开发一个基于GAO的基于GAO的基于GAO的基于GAO的滑动模式可重新配置的步骤尺寸PB&O MPPT控制器,以最大程度地提高PV系统的效率。该系统将与网格连接的电动汽车充电站无缝集成,以确保最佳的能量利用和可靠的24/7充电。