XiaoMi-AI文件搜索系统
World File Search System滑膛
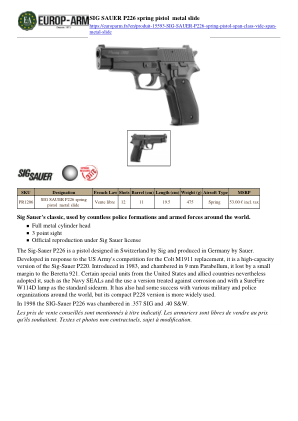
SIG SAUER P226 弹簧手枪金属滑套
西格-绍尔 P226 是一款由瑞士 Sig 公司设计、德国绍尔公司生产的手枪。它是为应对美国陆军对柯尔特 M1911 替代品的竞争而开发的,是西格-绍尔 P220 的大容量版本。它于 1983 年推出,发射 9 毫米帕拉贝鲁姆子弹,以微弱优势输给了伯莱塔 921。尽管如此,美国和盟国的某些特种部队还是采用了它,例如海豹突击队,并使用经过防腐蚀处理的版本并配有 SureFire W114D 灯作为标准随身武器。它在世界各地的军事和警察组织中也取得了一些成功,但其紧凑型 P228 版本使用更广泛。1998 年,SIG-绍尔 P226 发射 .357 SIG 和 .40 S&W 子弹。
为医疗补给任务的固定翼无人机设计滑模控制器
图 3.29:升降舵偏转信号 ...................................................................................................... 37 图 3.30:方向舵偏转信号 ...................................................................................................... 37 图 3.31:沿 X 方向的速度 B(“u”) ............................................................................................. 38 图 3.32:沿 Y 方向的速度 B(“v”) ............................................................................................. 38 图 3.33:沿 Z 方向的速度 B(“w”) ............................................................................................. 38 图 3.34:滚转速率(“p”) ............................................................................................................. 39 图 3.35:俯仰速率(“q”) ............................................................................................................. 39 图 3.36:偏航速率(“r”) ............................................................................................................. 39 图 3.37:滚转角度(“Phi”) ............................................................................................................. 40 图 3.38:俯仰角度(“Theta”) ........................................................................................... 40 图 3.39:偏航角(“Psi”)................................................................................................... 40 图 3.40:迎角
基于滑模控制方法的无模型控制算法及其在无人机系统中的应用
推荐引用 推荐引用 Kadungoth Sreeraj,Adarsh Raj,“基于滑模控制方法的无模型控制算法及其在无人机系统中的应用”(2019 年)。论文。罗彻斯特理工学院。访问自
无模型滑模控制算法(包括对真实四旋翼飞行器的应用)
摘要 - 滑模控制是一种鲁棒的非线性控制算法,已用于实现无人飞机系统的跟踪控制器,该控制器对建模不确定性和外部干扰具有鲁棒性,从而为自主操作提供出色的性能。无人飞机系统滑模控制应用的一个重大进步是采用无模型滑模控制算法,因为滑模控制实施中最复杂和最耗时的方面是结合系统模型推导控制律,这是每个单独的滑模控制应用都需要执行的过程。使用各种航空系统模型和真实世界干扰(例如离散化和状态估计的影响)在模拟中比较了各种无模型滑模控制算法的性能。结果表明,两种性能最佳的算法表现出非常相似的行为。这两种算法在四旋翼飞行器上实现(在模拟和使用真实硬件的情况下),并使用相同的状态估计算法和控制设置将其性能与传统的基于 PID 的控制器进行了比较。模拟结果表明,无模型滑模控制算法表现出与 PID 控制器相似的性能,而无需繁琐的调整过程。两种无模型滑模控制算法之间的比较表明,通过跟踪误差的二次均值测量,性能非常相似。飞行测试表明,虽然无模型滑模控制算法可以控制真实硬件,但在成为传统控制算法的可行替代方案之前,还需要进一步的特性描述和重大改进。无模型滑模控制和基于 PID 的飞行控制器都观察到了较大的跟踪误差,并且其性能对于大多数应用而言是不可接受的。两种控制器的性能不佳表明跟踪误差可以归因于状态估计中的误差。通过改进状态估计进行进一步测试将可以得出更多结论。关键词:无模型控制、滑模控制、鲁棒控制、飞行控制、无人机系统。1.简介

基于滑模方法的混合储能微电网频率协调控制策略
摘要 对于含可再生能源的微电网而言,频率稳定性至关重要,然而源荷不确定性会导致频率的恶化和储能设备的增加。为此,提出了一种基于滑模方法的含混合储能系统(HESS)微电网频率协调控制策略。首先,设计详细频率调节方案,将频率偏差和区域控制误差分成不同分量作为不同电源的功率参考值。其次,通过设计模糊控制器设定由超级电容和电池组成的HESS的功率阈值,以降低HESS的备用功率,避免不合理的功率输出。第三,建立含HESS的负载频率控制模型,并利用详细频率调节方案设计滑模控制。最后,通过不同算例的对比,验证了所提频率协调控制策略的有效性。

具有动态结构参数的滑臂四轴飞行器飞行控制
摘要 — 介绍了一种新型四轴飞行器的概念设计和飞行控制器。该设计能够在飞行过程中改变无人机的形状,以实现位置和姿态控制。我们考虑动态重心 ( CoG ),它会导致无人机的转动惯量 ( MoI ) 参数不断变化。这些动态结构参数在系统的稳定性和控制中起着至关重要的作用。四轴飞行器臂长是一个可变参数,它由基于姿态反馈的控制律驱动。MoI 参数是实时计算的,并纳入系统的运动方程中。无人机利用螺旋桨的角运动和可变的四轴飞行器臂长进行位置和导航控制。重心的运动空间是一个设计参数,它受执行器限制和系统稳定性要求的限制。提供了有关运动方程、飞行控制器设计和该系统可能应用的详细信息。此外,通过航路点导航任务和复杂轨迹跟踪的比较数值模拟对所提出的变形无人机系统进行了评估。

滑膜成纤维细胞作为类风湿关节炎的潜在药物靶标,我们站在哪里,我们应该去哪里?
抽象成纤维细胞样的滑膜细胞或滑膜成纤维细胞(FLS)是关节胶囊内层的重要细胞成分,称为滑膜。它们可以在该滑膜的两个层中找到,并通过产生细胞外基质成分和润滑剂来促进正常的关节功能。然而,在类风湿关节炎(RA)等炎症状况下,它们可能开始增殖,经历表型变化,并通过其直接和间接的破坏性功能在炎症永久化中成为中心元素。它们在自身免疫性关节疾病中的重要性使其具有吸引力的细胞靶标,并且作为间充质衍生的细胞,它们的抑制作用可以进行而不会产生免疫抑制后果。在这里,我们旨在概述我们当前对RA中这些细胞潜力的理解。
HLS 22RS-368 原版 2022 年常规会议众议院......
现行法律规定了猎杀鹿和熊的具体时间和方法。此外,任何人不得使用小于 .22 口径中心发火枪的枪支、使用装有比散弹或线膛子弹更少的子弹的霰弹枪、拉力小于 30 磅的弓或除宽头箭以外的其他武器猎杀或射杀鹿或熊。

通过贻贝启发的化学的液体液体湿滑表面的底物独立设计
LIS的设计可以分为三种一般策略:湿滑的液体注入的多孔表面(SLIPS),[2,4,7]有组织物,[3,6,19,20]和聚合物刷。[21,22]滑片依赖于两个主要因素:通过匹配表面化学,并引入表面粗糙度来最大程度地提高润滑剂对表面的亲和力,从而增强了毛细管对毛细管对底物的粘附。[5]在创建此类滑动系统的技术的开发中,已经有了巨大的研究。[5,13,23–27]典型地,该设计需要多个步骤来引入表面粗糙度,表面功能化和润滑剂。到目前为止,只有很少的研究表明了单步方法中的单块制造,例如,通过电喷雾既有透明质硅烷和全氟popotherether。[28]