XiaoMi-AI文件搜索系统
World File Search System滤清器


粒子滤清器大满贯用于车辆定位
* liu,tianrui是电子邮件,电子邮件:tianrui.liu.ml@gmail.com摘要:同时本地化和映射(SLAM)在机器人技术中提出了强大的挑战,涉及地图的动态构造,同时确定了居住环境中机器人的精确位置。这项复杂的任务进一步加剧了固有的“鸡肉和蛋”的困境,其中准确的映射依赖于对机器人位置的可靠估计,反之亦然。SLAM的计算强度增加了一层复杂性,使其成为现场至关重要但苛刻的话题。在我们的研究中,我们通过采用粒子滤光片大量方法来应对SLAM的挑战。我们的方法利用了编码的数据和光纤陀螺仪(FOG)信息,以实现对车辆运动的精确估计,而激光雷达技术通过提供对周围障碍的详细见解来有助于环境感知。这些数据流的集成最终在建立粒子滤清器猛击框架中,代表本文中的键工作,以有效地导航和克服与机器人系统中同时定位和映射相关的复杂性。

2023 年可持续发展报告
8 个工业基地 UFI 滤清器上海有限公司(中国) 索菲玛工业滤清器上海有限公司(中国) 索菲玛汽车滤清器长春有限公司(中国) 索菲玛汽车滤清器上海(售后市场部门) 索菲玛汽车滤清器重庆有限公司(中国) UFI 滤清器韩国有限公司(韩国) 索菲玛汽车滤清器上海有限公司(中国) UFI 绿色技术(嘉兴)有限公司(中国)

Rexroth 过滤器产品系列
借助旋风效应,流体以切线方向进入滤清器外壳,而不是直接与滤清器相交。因此,油包裹滤清器表面,并以向下的螺旋流动模式分布在滤清器介质表面上。这项正在申请专利的功能可确保重度污染颗粒被带出并远离滤清器滤芯,从而防止孔隙过早堵塞。这些较重的颗粒将积聚在滤杯的内部和底部,具体取决于实际的流体流动条件,从而增加污垢容纳能力并将滤清器更换间隔时间延长 7-10%。

微塑料和相关的塑料对滤清器二氧化碳的生理,生化,遗传表达和肠道微生物群的影响
索邦大学,CNRS,UMR 7621,微生物eanography实验室,Banyuls的愉悦观察者,F-666650 Banyuls-Sur-Sur-Mer,法国B SAS Plastic@Sea,OC SEA,OC oc'an Anological Obistration,Banyuls的Anological Obiservatory,Banyuls of Banyuls,F-666650,F-66650,F-66650,F-66650,F-66650,F-66650 F-66650 Banyuls-sur-Mer,法国,Genoscope,Genoscope,InstitutFrançoisJacob,CEA,CNR,CNRS,Univ Evry,Univers Paris-Saclay,F-91057 Evry,法国E,Toulouse E Universe of Toulouse,Toulouse,CNRS,CNR,UMR 5623,UMR 5623,摩尔(Moli)互动(ecloriation and Moli cocrionity and copliential and cothiolition and cothiolition and craporiation and cripation and cripation and cription and c。 F-31000 Toulouse,法国F Sorbonne University,CNRS,UMR 8222,底栖环境的Eochimia实验室,Oc'Es'Sanologique Banyuls of Banyuls,F-666650 Banyuls-Sur-Sur-Sur-Sur-Sur-Sur-法国,法国
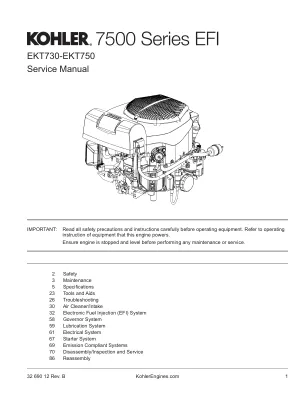
服务手册EKT730-EKT750
石油建议全季Kohler®Pro10W-50合成油是Kohler发动机的理想油。与Kohler Pro延长的寿命滤清器配对时,它是专门配制的,以将油和机油滤清器更换间隔扩展到300小时。300小时的石油和油滤清器更换间隔是独有的,并且仅在使用Kohler Pro 10W-50合成油和Kohler Pro Pro扩展寿命过滤器的Kohler发动机上授权。替代机油和油过滤器可能与Kohler发动机一起使用,但需要100小时的油和油过滤器换击间隔才能进行适当的维护。石油必须是API(美国石油研究所)服务类SJ或更高。在操作时根据空气温度选择粘度,如下所示。
航空推进系统中过滤碎片分析的改进
航空推进系统中过滤器碎片分析的改进 执行摘要 磨损碎片分析已被证明是一种有效的油浸系统状态监测工具,被认为是现有状态监测技术的宝贵补充。机油滤清器是有关飞机机械中油浸部件健康状况的潜在丰富信息来源,但在澳大利亚国防军中,机油滤清器作为状态监测工具的利用率通常较低。从历史上看,飞机机油滤清器碎片的分析非常耗时,不适合现场评估。与机油滤清器分析相关的两个主要挑战是以可靠且受控的方式提取碎片,并解释碎片以评估是否需要采取维护措施。特别是,军事环境(涉及定期部署到偏远地区或海上)对从机油滤清器中提取有用信息提出了一系列挑战。此外,引入精细油过滤的益处已得到充分证实,这使得一些传统的油分析技术(如光谱油分析 (SOA))变得无效。在航空推进机械中,这通常使过滤器和磁性碎片检测器成为磨损碎片信息的主要来源。本报告介绍了国防科学技术组织 (DSTO) 两项计划的应用,以改进对机油滤清器磨损碎片的分析。第一项计划涉及将现场手动碎片提取套件应用于 F117-PW-100 发动机(为 C-17A 飞机提供动力)机油滤清器。该套件使维护人员能够方便地提取过滤器碎片并将其放置在过滤器贴片上,以便在需要时进行检查和进一步分析。在这种情况下,用于提取的过程是目前在 RAAF PC-9/A 飞机上使用的手动方法。以前检查该发动机过滤器的方法包括目视检查每个过滤器褶皱并手动计数颗粒。新方法的优点包括更高的提取效率(即与以前的方法相比,碎片回收率更高)以及工作人员的工作更轻松、更省力。第二项举措涉及对一种名为 FilterCHECK 的商业仪器的评估、试用和引入。该设备使用反向流体流动与压缩空气脉动相结合的方式自动提取过滤器碎片。然后将所得浆液通过电感传感器以量化铁磁性和非铁磁性碎片。该仪器已应用于安装在 T56-A-14 和 T-56-A-15 发动机上的外部扫气过滤器(分别驱动 P3C 和 C130-H 飞机)。每隔 150 小时对这些澳大利亚皇家空军 (RAAF) 发动机进行常规过滤器碎片分析。该技术的优势包括处理过滤器所花费的时间更少、消除了工作人员接触危险溶剂的可能性以及保真度更高的颗粒检测方法。

FRR 525 - 黑锁五十铃
发动机:SiTEC 220(五十铃 6HK1-TCC) 类型:6 缸、4 冲程、24 气门、SOHC、直喷柴油机。涡轮增压和空对空中冷。可调式滚柱式摇臂。 排量:7,790 cc 压缩比:16.8:1 缸径 x 冲程:115 x 125 mm 最大功率(DIN NET):164 kW @ 2,400 RPM 最大扭矩(DIN NET):668 Nm @ 1,500 RPM • 排放标准:ADR 80/00(USEPA 1998)• 板式油冷却器。13.5 L 油容量。组合式全流量主滤清器和旁通油滤清器。 冷却系统 • 8 叶片、直径 640 mm 的冷却风扇,带恒温控制粘性离合器。 • 散热器正面面积:4,452 cm2 • 23 L 冷却液容量。进气系统 • 垂直进气口安装在驾驶室后部。两级 Donaldson 空气净化器,主滤芯为 280 x 380 mm,副滤芯为 160 x 350 mm。• 540 x 580 mm 空对空中冷器。燃油系统 • Denso 共轨燃油喷射。独立的燃油滤清器和水分离器。• 180 L 钢制油箱。