XiaoMi-AI文件搜索系统
World File Search System点密度
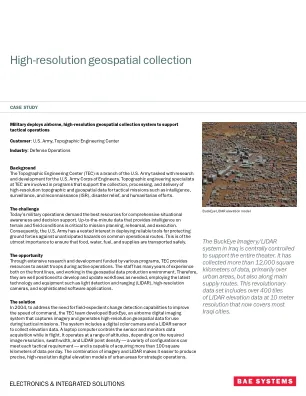
高分辨率地理空间集合
解决方案 2004 年,为了满足对现场应急变化检测能力的需求以提高指挥速度,TEC 团队开发了 BuckEye,这是一种机载数字成像系统,可捕捉图像并生成高分辨率地理空间数据,供战术任务使用。该系统包括一个数字彩色相机和一个用于收集高程数据的 LIDAR 传感器。笔记本电脑控制传感器并在飞行过程中监控数据采集。它可以在各种高度下运行,具体取决于所需的图像分辨率、扫描宽度和 LIDAR 点密度——各种配置可以满足每种战术要求——并且每天能够获取超过 100 平方公里的数据。图像和 LIDAR 的结合使得为战略行动生成精确的高分辨率城市数字高程模型变得更加容易。

搭建桥梁:21 世纪癌症治疗的分子成像生物标志物
摘要 (146 字) 精准医疗对癌症治疗产生了巨大影响,精准医疗通过评估疾病的分子基础来制定个性化治疗方案。与此同时,一种新的治疗学支柱也取得了巨大成功,包括免疫疗法,如检查点抑制剂和细胞疗法。尽管如此,开发预测和监测治疗反应的范例仍然至关重要。分子成像有可能大大增加癌症患者护理的所有阶段:预测性伴随诊断可以阐明肿瘤内的治疗靶点密度,药效学成像生物标志物可以补充传统模式以判断有利的治疗反应。这篇“聚焦分子成像”文章讨论了分子成像在肿瘤学中的当前作用,并强调了临床范例中称为“治疗生物标志物”的额外步骤,它用于评估下一代药物是否达到其目标以引起有利的临床反应。

搭建桥梁:21 世纪癌症治疗的分子成像生物标志物
精准医疗对癌症治疗产生了巨大影响,精准医疗通过评估疾病的分子基础来制定个性化治疗方案。与此同时,一种新的治疗学支柱也取得了巨大成功,包括免疫疗法(如检查点抑制剂)和细胞疗法。尽管如此,开发预测和监测治疗反应的范例仍然至关重要。分子成像有可能大大增加癌症患者治疗的所有阶段:预测性伴随诊断可以阐明肿瘤内的治疗靶点密度,药效学成像生物标志物可以补充传统方式以判断良好的治疗反应。这篇“聚焦分子成像”文章讨论了分子成像在肿瘤学中的当前作用,并强调了临床范例中称为治疗生物标志物的另一个步骤,它用于评估下一代药物是否达到其目标以引起良好的临床反应。

机载激光扫描仪数据的平面和高度精度
由于主要用于生成点间距为几米的数字地形模型,机载激光扫描仪数据的精度通常仅指定为高度精度。然而,数据采集系统的最新发展导致机载激光扫描仪数据的点密度大幅增加。与此同时,该技术越来越多地用于从高密度点数据生成 3D GIS 信息的新应用领域。在这些基于高密度数据集的应用中,数据点的高度和平面精度同等重要。对激光扫描仪系统组件的分析以及实际测试表明,机载激光扫描仪数据的高度精度通常明显优于平面精度。虽然单个地面点的高度精度通常在 10-15 厘米的量级,但可以说平面测量精度与地面飞行高度几乎呈线性关系,在飞行高度为 1000 米时,典型精度在 0.5-1.0 米的量级。高度和平面测量精度都受到显著的系统效应的影响,这些效应通常大于随机误差。

新贝德福德卫生局条例
14 Ying-Chih Chuang 等人,社区社会经济地位和便利店密度对个人吸烟的影响,59(7) J. Epidemiol Cmty Health 568 (2005) (doi: 10.1136/ jech.2004.029041);Shelley D. Golden 等人,2012 年美国县级烟草零售商密度与吸烟率之间的关联,17 (101005) Prev. Med. Rep. (2020 年 3 月) (doi: 10.1016/j.pmedr.2019.101005); Eric C. Leas 等人,美国最大城市吸烟率的地域不平等,179(3) JAMA Intern Med., 442 (2019) (doi: 10.1001/jamainternmed.2018.5990); JG Lee 等人,烟草零售商密度和距离与成人烟草使用行为和健康结果的关系:一项荟萃分析。烟草控制。首次在线发表:2021 年 9 月 3 日;LR Reitzel 等人,烟草销售点密度和距离对戒烟的影响。

Associate-3Ddet:用于 3D 点云对象检测的感知到概念关联
尽管最近的研究通过深度学习技术突破了极限,但从 3D 点云中进行物体检测仍然是一项具有挑战性的任务。由于严重的空间遮挡和点密度随到传感器距离的固有变化,同一物体在点云数据中的外观会有很大变化。因此,设计针对这种外观变化的鲁棒特征表示是 3D 物体检测方法的关键问题。在本文中,我们创新地提出了一种类似域自适应的方法来增强特征表示的鲁棒性。更具体地说,我们弥合了特征来自真实场景的感知域和特征从由富含详细信息的非遮挡点云组成的增强场景中提取的概念域之间的差距。这种领域自适应方法模仿了人脑在进行物体感知时的功能。大量实验表明,我们简单而有效的方法从根本上提高了 3D 点云物体检测的性能并取得了最先进的结果。
机载激光扫描仪数据的平面和高度精度
由于主要用于生成点间距为几米的数字地形模型,机载激光扫描仪数据的精度通常仅指定为高度精度。然而,数据采集系统的最新发展导致机载激光扫描仪数据的点密度大幅增加。与此同时,该技术越来越多地用于从高密度点数据生成 3D GIS 信息的新应用领域。在这些基于高密度数据集的应用中,数据点的高度和平面精度同等重要。对激光扫描仪系统组件的分析以及实际测试表明,机载激光扫描仪数据的高度精度通常明显优于平面精度。虽然单个地面点的高度精度通常在 10-15 厘米的量级,但可以说平面测量精度与地面飞行高度几乎呈线性依赖关系,在飞行高度为 1000 米时,典型精度在 0.5-1.0 米的量级。高度和平面测量精度都受到显著的系统效应的影响,这些效应通常大于随机误差。

分类单元出现数据的空间标准化 - 行动呼叫
图1。在地图视图中,物种 - 区域效应的示意图。A和C中的总采样区域(灰色盒)的大小是B中的两倍;这些边界区域可以代表三个时间步长或比较大洲的总保留露头区域。研究区域内的单个抽样位点用清晰的盒子表示,物种出现用小写字母表示。在单个位点的物种数量是α多样性(为简单起见,每个面板中的一个位点注释)。研究区域内的总物种数量是γ多样性。有许多关于β多样性的指标,与站点之间的物种离职有关,但是简单而原始的措施是伽玛与平均alpha的比率(Whittaker 1960,1972)。请注意,尽管Alpha,物种的地理范围大小和位点密度相同,但Beta和Gamma多样性随着采样面积从B到A的两倍而增加。没有考虑采样区域的差异,(古)生态学家可能会错误地推断出比B更多样化的时间箱,并且比例范围较小。c也比B具有更大的beta和γ多样性,因为站点之间的分散较大。

知道您的邻居:通过空间视觉语言推理改善单视的重建
从单个视图中恢复3D场景几何形状是计算机视觉中的基本问题。虽然经典的深度估计方法仅推断出2.5D场景表示为图像平面,但最新的基于辐射范围的aperach是重建完整的3D代表。然而,这些方法仍然在被占地的区域困难,因为没有视觉观察的几何形状需要(i)周围的语义知识,以及(ii)关于空间上下文的推理。我们提出了Kyn,这是一种单视场景重建的新方法,其原因是语义和空间上下文来预测每个点的密度。我们引入了一个视觉模块模块,以使用细粒度的语义信息丰富点特征。我们通过语言引导的空间注意机制在整个场景中汇总了点表示,以产生意识到3D语义环境的每点密度预测。我们表明,与预测每个3D点的密度相比,Kyn改善了3D形状的恢复。我们在Kitti-360上实现了最新的场景和对象重建结果,并且与先前的工作相比,零弹性概括的改进。项目页面:https://ruili3.github.io/kyn。

机载激光扫描的潜力
从冰川高山高精度生成 DGM - 机载激光扫描的潜力 Dominik Lenhart1、Helmut Kager2、Konrad Eder3、Stefan Hinz1、Uwe Stilla3 1 慕尼黑工业大学遥感方法学主席 2 维也纳工业大学摄影测量与遥感研究所³摄影测量与遥感系,慕尼黑工业大学 摘要:机载激光扫描 (ALS) 提供了以高度自动化生成高精度数字地形模型 (DGM) 的可能性。虽然这项技术在农村和城市地区的准确性潜力已经在许多研究和应用中得到证明,但本文分析了这种记录方法在冰川高山中的准确性潜力。结果表明,通过同步条纹调整进行地理配准可以最大限度地减少相邻纵向条纹之间的差异,并将数据添加到几厘米的 GPS 护照信息中。例如,在雪面等光滑区域,内部精度为 5-8 厘米,在较粗糙的岩石区域,内部精度约为 17-30 厘米。除了高精度之外,数据集的点密度还提供了一个有趣的分析方面。例如,冰川舌区域的部分记录失败(由吸收和可能的定向反射引起)——这对于 DGM 来说本质上是负面的——开辟了新的调查可能性,例如当地的 S