XiaoMi-AI文件搜索系统
World File Search System王静步
广东力科新能源有限公司Guangdong Pow-Tech New Power ...
Constant current 0.2C charge to FC Voltage, then constant voltage FC Voltage charge to current declines to 0.02C, rest for 10min, constant current 0.2C discharge to 2.8V, rest for 10min.Repeat above steps till continuously discharge capacity higher than 80% of the initial capacity of the battery.电池以0.2C 充饱,静置10 分钟,然后以0.2C 放空, 静置10 分钟。重复以上充放电循环直至放电容量低于初 始容量的80%。

热带药物研究杂志 2022 年 7 月;21 (7): 1523-1529 ISSN: 1596-5996(印刷版);1596-9827(电子版)© 药物治疗组,Facu
热带药学研究杂志 2022 年 7 月;21 (7): 1523-1529 ISSN:1596-5996(印刷版);1596-9827(电子版)© 尼日利亚贝宁城贝宁大学药学院药物治疗组,邮编 300001。在线获取网址:http://www.tjpr.org http://dx.doi.org/10.4314/tjpr.v21i7.24 原创研究文章 多西他赛-吉西他滨化疗联合 5-氟尿嘧啶靶向治疗治疗晚期非小细胞肺癌的疗效和安全性 秦叶宇 1、谢静 1、王海霞 2 * 海南省人民医院(海南医学院海南附属医院)1 药剂科,2 肿瘤内科,海南省海口 570311 *通讯地址:电子邮箱:wanghaixia74@163.com 送审日期:2022 年 1 月 8 日 修订接受日期:2022 年 6 月 30 日

rAAV 介导的耳蜗基因治疗 - HAL Um
1 INSERM-UMR 1051,蒙彼利埃神经科学研究所,圣埃洛伊医院-INM 大楼,80, rue Augustin Fliche-BP 74103,34091 蒙彼利埃,法国; m-mondain@chu-montpellier.fr(MM); corentin.a ffitortit@inserm.fr(CA); jean-luc.puel@inserm.fr (J.-LP) 2 蒙彼利埃大学,163 rue Auguste Broussonnet, 34090 Montpellier, 法国 3 CHRU 蒙彼利埃——地区大学医院中心,34090 Montpellier, 法国 4 分子成像研究中心,François Jacob 生物研究所,基础研究部,CEA,92265 Fontenay-aux-Roses,法国; alexis.bemelmans@cea.fr 5 巴黎萨克雷大学,CEA,CNRS,UMR9199 神经退行性疾病实验室,92265 丰特奈-玫瑰,法国 * 通讯地址:fabian-blanc@chu-montpellier.fr (FB);王静(jing.wang@inserm.fr);电话:+ 33-499-63-60-48(JW)

绝对音调脑电图静息态脑网络的异质性
绝对音高 (AP) 是指无需外界参考即可轻松识别乐音的能力,其神经基础尚不清楚。关键问题之一是这一现象背后是感知过程还是认知过程,因为感觉和高级大脑区域都与 AP 有关。为了整合对 AP 的感知和认知观点,我们在此研究了感觉和高级大脑区域对 AP 静息态网络的共同贡献。我们对大量 AP 音乐家 (n = 54) 和非 AP 音乐家 (n = 51) 的源级 EEG 进行了全面的功能网络分析,采用两种分析方法:首先,我们应用基于 ROI 的分析来检查听觉皮层和背外侧前额叶皮层 (DLPFC) 之间的连接,使用几种已建立的功能连接测量方法。这项分析重复了之前的一项研究,该研究报告了 AP 音乐家这两个区域之间的连接增强。其次,我们对相同的功能连接测量进行了基于全脑网络的分析,以更全面地了解可能涉及支持 AP 能力的大规模网络的大脑区域。在我们的样本中,基于 ROI 的分析没有提供听觉皮层和 DLPFC 之间 AP 特定连接增加的证据。全脑分析显示,AP 音乐家的三个网络连接增加,包括额叶、颞叶、皮层下和枕叶区域的节点。在感觉和大脑周边区域的高级区域都发现了网络的共同点。需要进一步研究来证实这些探索性结果。
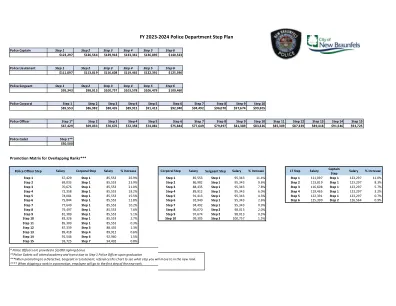
2023-2024 财年警察局分步计划
步骤 1 67,429 步骤 1 85,553 26.9% 步骤 1 85,553 步骤 1 95,343 11.4% 步骤 1 111,097 步骤 1 123,297 11.0% 步骤 2 69,033 步骤 1 85,553 23.9% 步骤 2 86,982 步骤 1 95,343 9.6% 步骤 2 113,819 步骤 1 123,297 8.3% 步骤 3 70,676 步骤 1 85,553 21.0% 步骤 3 88,435 步骤 1 95,343 7.8% 步骤 3 116,608 步骤 1 123,297 5.7% 步骤 4 72,358步骤 1 85,553 18.2% 步骤 4 89,912 步骤 1 95,343 6.0% 步骤 4 119,465 步骤 1 123,297 3.2% 步骤 5 74,081 步骤 1 85,553 15.5% 步骤 5 91,413 步骤 1 95,343 4.3% 步骤 5 122,391 步骤 1 123,297 0.7% 步骤 6 75,844 步骤 1 85,553 12.8% 步骤 6 92,940 步骤 1 95,343 2.6% 步骤 6 125,390 步骤 2 126,564 0.9% 步骤 7 77,649 步骤 1 85,553 10.2% 第 7 步 94,492 第 1 步 95,343 0.9% 第 8 步 79,497 第 1 步 85,553 7.6% 第 8 步 96,070 第 2 步 98,013 2.0% 第 9 步 81,389 第 1 步 85,553 5.1% 第 9 步 97,674 第 2 步 98,013 0.3% 第 10 步 83,326 第 1 步 85,553 2.7% 第 10 步 99,305 第 3 步 100,757 1.5% 第 11 步 85,309 第 1 步 85,553 0.3% 第 12 步 87,339 第 3 步 88,435 1.3% 第 13 步89,418 第 4 步 89,912 0.6% 第 14 步 91,546 第 6 步 92,940 1.5% 第 15 步 93,725 第 7 步 94,492 0.8%
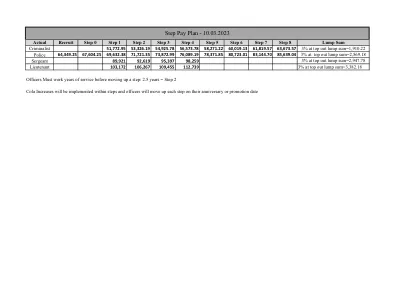
2024 步骤计划.xlsx
实际招募 第 0 步 第 1 步 第 2 步 第 3 步 第 4 步 第 5 步 第 6 步 第 7 步 第 8 步 刑事侦查员 51,772.95 53,326.19 54,925.78 56,573.78 58,271.22 60,019.13 61,819.57 63,673.57 警察 64,349.25 67,604.25 69,632.38 71,721.35 73,872.99 76,089.19 78,371.85 80,723.01 83,144.70 85,639.04 警长 89,921 92,619 95,397 98,259中尉 103,172 106,267 109,455 112,739

带稳定性增强器的无尾飞行器增量反步滑模轨迹控制
摘要:本文提出了一种增量反步滑模(IBS)控制器,用于无尾飞机的轨迹控制,该控制器具有未知干扰和模型不确定性。所提出的控制器基于无尾飞机的非线性动力学模型。提出了一种限制虚拟控制输入速率和幅度的稳定性增强器(SE)。稳定性增强器由两层组成。当虚拟控制输入接近边缘时,将激活第一层 SE 来修改轨迹跟踪误差;当虚拟控制输入超出边缘时,第二层 SE 将降低控制增益以确保虚拟控制输入尽快落在边缘内。在 SE 的帮助下,增量控制方法可以扩展到外环控制,而无需考虑内环系统的动态特性。此外,提出了一种状态导数自适应估计器,与 IBS 相结合,使控制器表现出良好的鲁棒性。最后,给出了两个仿真。第一次仿真表明系统对外部干扰和模型不确定性不敏感,第二次仿真证明了 SE 的有效性。
基于反步滑模的共轴旋翼飞行器轨迹跟踪控制算法及试验
摘要:针对共轴旋翼飞行器自主飞行过程中模型参数的不确定性、外界扰动及传感器噪声对飞行的影响,研究位置姿态反馈控制系统的鲁棒反步滑模控制算法,以解决未知外界干扰情况下飞行器的轨迹跟踪问题。本文针对未知飞行,建立了基于受扰共轴旋翼飞行器的非线性动力学模型。然后,设计了非线性鲁棒反步滑模控制器,分为共轴旋翼飞行器的姿态控制器和位置控制器两个子控制器。在控制器中引入虚拟控制,构造Lyapunov函数,保证各子系统的稳定性。通过数值仿真验证了所提控制器的有效性。最后通过飞行试验验证了反步滑模控制算法的有效性。
文章 带稳定性增强器的无尾飞机增量反步滑模轨迹控制
摘要:本文提出了一种增量反步滑模 (IBS) 控制器,用于无尾飞机的轨迹控制,该飞机具有未知的干扰和模型不确定性。所提出的控制器基于无尾飞机的非线性动力学模型。提出了一种稳定性增强器 (SE),它限制了虚拟控制输入的速率和幅度。稳定性增强器由两层组成。当虚拟控制输入接近边缘时,第一层 SE 将被激活以修改轨迹跟踪误差;当虚拟控制输入超过边缘时,第二层 SE 将降低控制增益以确保虚拟控制输入尽快落在边缘内。借助 SE,增量控制方法可以扩展到外环控制,而无需考虑内环系统的动态特性。此外,提出了一种状态导数的自适应估计器,与 IBS 一起,使控制器表现出出色的鲁棒性。最后,给出了两个仿真结果。第一次仿真表明系统对外界干扰和模型不确定性不敏感,第二次仿真证明了SE的有效性。