XiaoMi-AI文件搜索系统
World File Search System电动机
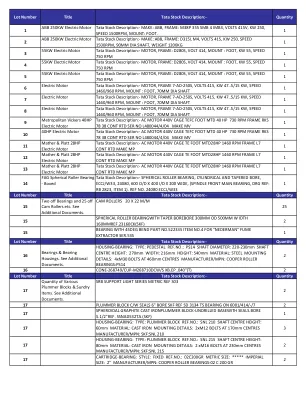
数量 1 ABB 250KW 电动机 Tata Stock De
轴承-滚子:类型:圆柱形参考编号。:LRJ1.7/8JC3 行:***** 内径:1 7/8" 外径:4" 宽度:13/16" 样式:***** 径向间隙:C3 保持架材质:钢 其他数据:额定载荷,CR = 70500N,额定转速(油)= 9500RPM,额定转速(油脂)=7100RPM。此产品无润滑槽和孔,具有正常精度等级 制造商/MPN:NSK (RHP):LRJ1.7/8JC3
S32M27X PMSM/BLDC电动机控制评估板
S32M27X是一种基于内部32位ARM®Cortex®-M7 S32K3微控制器的集成解决方案,并带有电压调节器,栅极驱动器,电流传感和LIN/CAN物理层。评估委员会可以对BLDC和PMSM控制应用程序进行快速原型和评估,而无需等待最终硬件设计。

关于技能,人才和劳动力发展的聚光灯:电气化电动机电机
高到中度的劳动力差距表明,预计对工人的总需求超过了劳动力市场上的工人的可用性,这表明在寻找合格的工人方面可能挑战。高间隙对于制造能力而言更为敏锐和突出,并且鉴于高水平的就业和预期增长,这对于人才吸引力来说是一个很高的优先事项。

智能电动电动电动机电池用动态温度切换
除了监视温度和电荷水平之外,该系统还跟踪最佳EV性能必不可少的其他关键参数。这包括评估功耗和充电效率,以确保有效使用能源并最大程度地减少充电时间。还考虑了温度,湿度和高度等环境条件,因为它们会影响电池性能和整体车辆效率。此外,该系统通过分析数据趋势来预测潜在问题并建议主动维护操作来提供预测性维护。用户的偏好和设置(例如首选充电时间和温度舒适度)已集成以个性化驾驶体验并优化电池使用情况。通过考虑这些因素,电池监视系统提供了全面的概述,概述了电动汽车的性能和状况,使用户能够做出明智的决策并最大程度地提高效率和寿命。

中风康复后电动机执行网络的结构连通性变化
摘要。背景:尽管很少有研究测试了干预后的结构连通性变化,但它仅反映了运动网络中选择的关键大脑区域。因此,对与运动恢复过程相关的结构连通性变化的理解尚不清楚。目的:本研究调查了在使用图理论方法的中风理论方法后,低频重复转颅磁刺激(LF-RTMS)(LF-RTMS)和强化职业治疗(OT)的结合干预调查了运动执行网络的结构连通性变化。方法:56名中风患者接受了FUGL-MEYER评估(FMA),狼运动功能测试功能量表(WMFT-FAS),扩散张量成像(DTI)和T1加权成像前后。我们使用结构连接组检查了与二十个大脑区域有关的图理论测量。结果:中风后干预后的ipsiles和对侧半球显示出结构连通性的变化。我们发现,额头内的区域核心和淋巴结效率显着提高,并且在ipsilesital thalamus中的程度中心性和淋巴结效率降低。在库纳斯,中心后,前中央回和ipsilesiles hemisphere的网络测量和临床评估之间发现了相关性。相反区域,例如尾状,小脑和额叶,也显示出显着的相关性。结论:这项研究有助于扩展对LF-RTMS和中风后大量OT的运动恢复过程中两个半球网络的结构连通性变化的理解。

从模拟到电动机执行:对动态运动图像对性能的影响的审查
Aymeric Guillot,Franck Di Rienzo,Cornelia Frank,Ursula DeBarnot,Tadhg E MacIntyre。从模拟到电动机执行:对动态运动图像对穿孔的影响的回顾。国际体育和运动心理学评论,2021,17(1),pp.420-439。10.1080/1750984x.2021.2007539。hal-04672047
美国能源部的目标是$ 15.5B,用于电动电动机,电池厂改装
确定奖励的关键也是工厂转换的经济影响 - 制造商可能会保留高质量的工作,“特别关注社区,在汽车制造业中具有较长历史的设施,”该机构说,尤其是那些拥有20年或以上有生产车辆或提供各种零件的历史的人。

毫秒尺度的电动机编码先于鸣禽中的感觉运动学习
摘要在年轻动物中神经系统的关键目标是学习运动技能。Songbirds 11学会唱歌为少年,提供了一个独特的机会来识别技能12获取的神经相关性。先前的研究表明,在歌曲获取过程中,声带皮层的尖峰速率可变性大大降低了13个,这表明从基于速率的神经控制到14的过渡到14毫秒至少的运动代码,已知是成人人声表现的已知。通过15区分尖峰模式的合奏是如何通过皮质神经元(“神经16词汇”)和尖峰模式与歌曲声学(“神经代码”)之间的关系17在歌曲获取过程中的变化,我们量化了18个少年bengence bengengale bengengale bengengale bengengalesection of to song ockisition。我们发现,尽管率变异性的预计会下降(峰值词汇的19个学习相关变化),但最年轻的20名歌手中神经代码的精度与成年人相同,峰值正时的1-2毫秒变化转移到21个量子上,差异很大。相比之下,较长的时间标准的爆发率失败了22,会影响少年动物和成年动物的运动输出。在变化的尖峰速率和行为可变性水平上,始终存在23毫秒的电动机编码24表明,与学习相关的皮质活动的变化反映了大脑更改其尖峰25词汇以更好地匹配潜在的运动代码,而不是在26代码本身的准确性中匹配基础运动代码。27

.4cmstudy基于图像处理的新能量车辆电动机系统的视觉感知控制
本文根据图像处理技术介绍了一种新的能源车辆驾驶控制系统。通过处理和分析道路图像,新的能源驾驶控制系统能够识别道路元素,计划路线并计算其方向和速度参数。为了改善系统在各种环境中的适用性,它首先将道路图像分为两类:路面和其他物体。然后,它使用手动迭代方法来确定最佳阈值,并建议一种自适应阈值改进方法。第二,该系统将进行道路元素的特征提取,包括样本类型,例如坡道,直路,曲线,十字路口和障碍物。通过辅助特征提取和样品类型表征,系统实现了各种道路元素的识别和分类。最终,系统执行了图像捕获,预处理和边界提取。然后使用路径计划和道路中心线拟合来实现车辆导航。该技术确定了角参数,并在车辆方向和速度参数测试期间提供了车辆的精确导航方向。新能量汽车的驾驶控制系统非常适用且实用,为这些车辆在复杂的道路条件下安全运行提供了有效的技术援助。