XiaoMi-AI文件搜索系统
World File Search System电磁兼容

新型电磁威胁防护系统
摘要。本文讨论的问题涉及一种新的军事行动——电子战 (EW)。在电子战的背景下,高功率微波 (HPM) 技术目前能够远程干扰操作,直到电路重置或电子系统被破坏。本文探讨了使用 HPM 脉冲的保护和防御问题。这项研究使用了波兰国家核研究中心开发的紧凑型 HPM 发生器。它的功率为 3MW,工作频率为 2.9 GHz,脉冲持续时间为 3 μs,发射重复率为 1、50、100 和 250 Hz。开发的 HPM 脉冲保护系统在训练场的开放空间、陆地和海洋部分以及带有混响室的电路中受到强烈的场暴露。使用高功率 D 点探头测试每个测量站上产生的场的分布,数据通过光纤链路从该探头传输到记录系统。在所有情况下,这种分布都是重复的。带有记录器的现场探头用于测量复合结构内部。业余无人机、手机、相机和使用基于微机械单元的传感器的系统中未受保护的电子系统暴露在外。进行了分析以检查电子电路的运行、暴露于强微波辐射期间引起的影响和发生的现象。发现开发的系统在类似于实际暴露于高功率微波武器的条件下满足设计假设。已经确定了各种辐射束入射空间配置的屏蔽效率。提出的用于保护和防御高功率微波武器影响的系统采用复合混合吸收器技术,能够有效消除电磁脉冲效应。关键词:无人机、电子战、微波定向能武器、电磁兼容性 1. 威胁概述
电磁故障注入和汽车系统
第 1 部分:https://www.youtube.com/watch?v=Icw7GGriHzY 第 2 部分:https://www.youtube.com/watch?v=orksRsHU0Bc
联合电磁频谱管理行动
b.军事行动是在作战环境中执行的,由于对 EMS 使用的要求越来越密集和复杂。作战环境是影响能力使用和影响指挥官决策的条件、情况和影响的综合体。它被定义为具有地理边界的区域,以促进联合部队组成部分和支援指挥部之间联合行动的协调、整合和冲突消除。功能依赖于电磁 (EM) 能量的发射器越来越多地被民间和军事组织和个人单独或以网络形式使用,用于情报;通信;定位、导航和授时 (PNT);传感;指挥和控制 (C2);攻击;测距;无人机系统;民用基础设施;数据传输;信息存储和处理;以及各种其他目的。复杂的 EMS 依赖系统的便携性和可负担性不断提高,保证了军队所处的每个 EMOE 在未来都会变得更加复杂。军队需要不受阻碍地访问和使用 EMS,这一认识产生了联合电磁频谱作战 (JEMSO) 的需求。JEMSO 是为成功规划和执行联合或多国行动而开展的活动,目的是控制和管理 EMOE 的使用。JEMSO 是

海底电缆电磁辐射的影响......
4.1.2.3. 直流电缆的设计特性 ......................................................................39 单极子系统 ......................................................................................39 双极子系统 ......................................................................................42 4.1.3. 海底电力电缆的预期 EMF 水平 ........................................................42 4.1.3.1. 交流磁场 ......................................................................................43 4.1.3.2 直流磁场 ......................................................................................45 4.1.3.3 直流电场 ......................................................................................48 4.1.3.4 感应电场 ......................................................................................49 4.1.3.5. 非正常条件下的 EMF ................................................................50 4.2. 对磁敏感和对电敏感的海洋生物 ................................................................50 4.2.1. 海洋生物的磁感应和电感应 ................................................................51 4.2.1.1. 4.2.1.2. 海洋生物的感觉系统 ......................................................................51 4.2.1.3. 磁感受 ......................................................................................52 4.2.1.3. 电感受 ......................................................................................53 4.2.1.4. 人为电磁辐射对海洋生物的潜在影响 .............................................................54 4.2.2.板鳃类 ................................................................................................................54 4.2.2.1 现有信息的回顾 ................................................................................54 EMF 敏感性的证据基础 ........................................................................54 电感受器的解剖学和生理学 ........................................................................54 板鳃类鱼的磁感受机制 ................................................................59 电感受器的功能作用 ................................................................................60 板鳃类物种初步列表 .............................................................................61 4.2.2.2 海底电缆 EMF 的影响 .............................................................................61 预期 EMF 水平与报告的敏感性的比较 .............................................................................................61 交流电缆系统 .............................................................................................61 直流电缆系统 .............................................................................................62 直接磁感受 .............................................................................................62 4.2.2.3 对板鳃类的潜在影响 .............................................................................63 迁徙 .............................................................................................................63 非迁徙物种和栖息地利用..................................................63 摄食行为...............................................................................63 生殖行为....................................................................................................63 育苗场 ................................................................................................64 4.2.2.4 各地区的重点物种 ..............................................................................64 4.2.2.5 沙洲鲨 Carcharhinus plumbeus 案例研究 ........................................66 结论 ......................................................................................................68 4.2.3. 其他鱼类 ......................................................................................................69 4.2.3.1 现有信息审查 ......................................................................................69 EMF 敏感性的证据基础 .............................................................................69 电感受 .............................................................................................................69 磁感受 .............................................................................................................74 其他鱼类物种初步清单 .............................................................................75 4.2.3.2 海底电缆 EMF 的影响 .............................................................................75 预期 EMF 水平与报告的敏感性的比较 .................................................................75 对其他鱼类的潜在影响 .................................................................................77
生物医学应用的电磁材料
摘要。此迷你审查研究了超材料的最突出的特征和用法,例如用于生物医学应用的基于超材料和超材料启发的RF组件。重点是用于传感和成像系统的应用,可穿戴和可植入的天线,用于遥测,并用作可触发吸收剂的超材料,以防止极端电磁(EM)辐射。提出了有关超材料组成,实施和幻影准备的简短讨论和趋势。本综述旨在编译最先进的生物医学系统,这些系统利用超材料概念以某种形式或另一种形式增强其性能。目标是突出超材料的各种应用,并证明不同的超材料技术如何影响从RF到THZ频率范围的EM生物医学应用。的见解和开放问题,从而阐明了原型制作过程。

电磁时空分化器
可以在空间和时间域中执行数学操作的时空光学计算设备可以提供前所未有的措施来构建高效且实时的信息处理系统。尤其重要的是要在紧凑的设计中实现综合功能,以更好地与电子组件整合。在这项工作中,我们基于非对称的跨表面的微波中的模拟时空区分剂实验表明,该微波在时空域中具有相位奇异性。我们表明,这种结构可以通过调整Spoof表面等离子体偏振子(SSPPS)的单向激发来引起理想的一阶区分和时间域中理想的一阶区分所需的时空传递函数。使用金属缝进行空间边缘检测,并通过不同宽度的高斯样时间脉冲检查设备的时间分化能力。我们进一步证实了此处证明的区别,即使有复杂的曲线,也可以检测到时空脉冲的急剧变化,理论上估计了空间和颞边检测的分辨率限制。我们还表明,通过此处实施的时空差异剂后的脉冲输入可以携带带有分形拓扑电荷的横向轨道角动量(OAM),从而进一步增加了信息数量。

兼容所有 TT RGB PLUS 电源
所有 Thermaltake TT RGB PLUS 产品均可连接到 Razer Chroma 生态系统。安装 TT RGB PLUS 软件和 Razer Synapse 3。
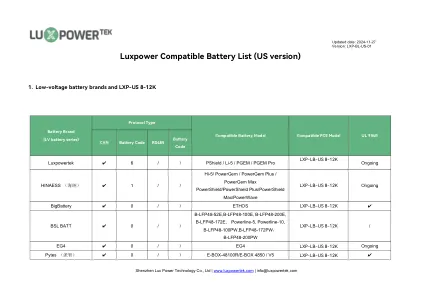
LuxPower兼容电池列表(美国版)
Pytes (派智)✔0 / / / e-box-48100R / e-box 4850 / v5 sna-us 6000 / sna-nb-us 6000 / sna-us 12k < / div < / div < / div < / div < / div>
航空电磁和磁地球物理调查...
永久冻土在世界各地的高纬度地区普遍存在,对寒冷地区的水文和生态有重大影响。气候变化可能会导致永久冻土分布发生变化,影响地下水和地表水相互作用、栖息地和生态系统、人造基础设施以及全球碳循环(Jorgenson 等人,2001 年;Nelson 等人,2002 年;Hinzman,2005 年;Walvoord 和 Striegl,2007 年;Froese 等人,2008 年;Schuur 等人,2008 年;Rowland 等人,2010 年)。目前,永久冻土的三维 (3-D) 分布受到严格限制,特别是在总永久冻土厚度的变化和未冻结区域或“taliks”的分布方面。缺乏对分布的了解限制了我们建立地下水流系统和地下水与地表水相互作用的现实概念和数值模型的能力。更好地了解当前的冻土分布对于提高我们对这些地区水文过程的了解以及评估生态系统、栖息地和基础设施对气候变化的脆弱性至关重要。绘制冻土图面临特殊挑战。由于冻土空间分布的预期变化,钻探等直接采样技术不足以表征冻土的范围或厚度,因为在寒冷地区此类数据稀疏。后勤问题也存在,因为冻土区通常道路很少,生态敏感,难以进入且成本高昂。地球物理方法提供了一种直接采样的替代方法,可以在有限的陆上旅行中提供更多空间连续的数据。地球物理方法测量地下物理特性的变化,例如电阻率、介电常数和地震速度。这些特性可能会有很大差异
10BASE-T1S PHY 的电磁抗扰度性能
• 多点、半双工:一个发送器节点,其他节点为接收器 • 接收器分接节点的要求:最小输入阻抗 > 10 kΩ • MDI 处的终端电阻,因为终端节点 PHY 可以是接收器节点