XiaoMi-AI文件搜索系统
World File Search System目标搜索

建模全染色体目标搜索
摘要最常见的基因调节机制是当转录因子(TF)蛋白与调节序列结合以增加或减少RNA转录时。但是,在搜索这些序列时,TFS面临两个主要挑战。首先,相对于基因组长度,这些序列消失了。第二,散布在整个基因组上的几乎相同的序列,导致蛋白质暂停搜索。,但正如大肠杆菌中LACI调节的计算研究中所指出的那样,如果考虑DNA循环,这种几乎目标可能会较低。在本文中,我们探讨了这是否也发生在整个染色体的距离上。为此,我们开发了一个跨尺度的计算框架,该框架结合了建立的促进式扩散模型,用于基地级搜索和一个捕获全染色体范围的飞跃的网络模型。为了使我们的模型逼真,我们使用HI-C数据集作为超过100 TF的长期DNA片段和结合曲线之间3D接近的代理。使用我们的跨尺度模型,我们发现指向单个目标的中位数搜索时间严重取决于网络组合的结合节点强度(链接权重的总和)和局部分离率。另外,通过随机化这些速率,我们发现某些实际的3D目标配置比随机对应物更快或较慢。这一发现暗示染色体的3D结构漏斗对于相关的DNA区域必不可少。

未知空间上的协同映射和目标搜索...
摘要 — 本文提出了一种协作式地图绘制和目标搜索算法,用于在城市环境中检测单个移动地面目标,该目标最初对于配备有噪声、范围有限的传感器的自主四旋翼飞行器团队来说是未知的。目标根据有偏随机游走模型移动,搜索代理(四旋翼飞行器)构建一个目标状态图,该图对过去和现在的目标位置进行编码。检测前跟踪算法将目标测量值同化为对数似然比,各向异性克里金插值预测未探索区域中占用节点的位置。在搜索区域的每个位置评估的相互信息定义了一个采样优先级表面,该表面由加权 Voronoi 算法划分为候选航路点任务。通过迭代解决效用最大化分配问题,将任务分配给每个代理。数值模拟表明,与非自适应割草机和随机覆盖策略相比,所提出的方法更具优势。我们还通过使用两个真实四旋翼飞行器和两个虚拟四旋翼飞行器进行户外飞行测试,对所提出的策略进行了实验验证。

用于移动目标搜索和跟踪的协作无人机框架
最近,协作式无人机 (UAV) 已用于多种复杂的军事和民用应用中。移动目标搜索 (MTS) 和移动目标跟踪 (MTT) 是需要协作式无人机参与的基于 UAV 的应用之一。因此,本文提出了一种用于 MTS 和 MTT 的协作式无人机框架,称为 (CF-UAVs-MTST)。CF-UAVs-MTST 基于 GzUAV 联合模拟器。它提供了一种 MTS 机制来为 UAV 生成空中航路点。MTS 算法考虑了飞行速度和高度以及机载摄像机的分辨率。MTS 算法可确保有效的覆盖率,约为 96.2%。在执行 MTS 任务时,将运行一种基于级联分类器的算法来检测目标。此外,我们提供了一种 MTT 机制来估计目标运动并设计最佳跟踪路径。仿真结果表明,CF-UAVs-MTST 可以实现快速且高精度的跟踪。
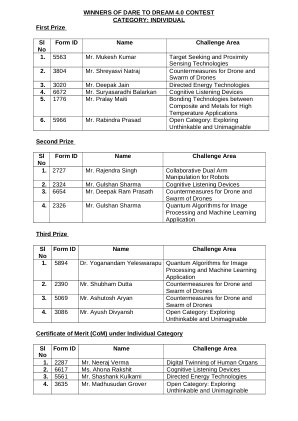
敢于梦想 4.0 比赛类别的获胜者
1. 5563 Mr. Mukesh Kumar 目标搜索和近距传感技术 2. 3804 Mr. Shreyasvi Natraj 无人机和无人机群对抗措施 3. 3020 Mr. Deepak Jain 定向能技术 4. 6672 Mr. Suryasaradhi Balarkan 认知听力设备 5. 1776 Mr. Pralay Maiti 复合材料与金属之间的高温应用粘合技术 6. 5966 Mr. Rabindra Prasad 开放类别:探索不可想象和难以想象的事物

如何引用本文:Sun B, Pang W, Chen M, Zhu D. Development and Experimental Verify of Search and Rescue ROV. Intell Robot 2022;2(4):355-70. http://dx.doi.org/10.20517/ir.2022.23。
本文提出了一种新型搜救遥控机器人(ROV)系统的设计,目标是实现水下目标搜索探测和小目标抓捕及救援的作业要求。首先给出了整个水下系统总体设计和推进系统布局设计。在此基础上对ROV框架结构、电子舱、动力舱进行了设计与分析。为完成抓取任务,基于多功能机械手设计了抓取手,实现水下抓取。为使ROV更加智能化,采用并分析了不同类型的水下物体检测与跟踪方法。最后,在水池和海上进行了试验,验证了所设计的搜救ROV的可靠性和稳定性。
搜索和实验验证...
本文提出了一种新型搜救遥控机器人(ROV)系统的设计方案,其目标是实现水下目标搜索探测和小目标捕获及救援作业要求。首先给出了整个水下系统总体设计和推进系统布局设计。在此基础上对ROV框架结构、电子舱、动力舱进行设计分析。为完成抓取任务,基于多功能机械手设计了抓取手,实现水下抓取。为使ROV更加智能化,采用并分析了多种水下物体检测与跟踪方法。最后,在水池和海上进行了试验,验证了所设计的搜救ROV的可靠性和稳定性。
引用了原始发表的论文(记录的版本):Lai,H.,Kannas,C.,Hassen,A。等(2025)。 MEA
我们基于蒙特卡洛树搜索形式主义引入了一种多目标搜索算法,以进行反归结计划。多目标搜索允许将各种目标组合起来,而无需考虑其规模或加权因素。为基于这种新型算法进行基准测试,我们在八个反曲面实验中采用了四个目标。目标范围从基于起始材料和步骤计数的简单目标到基于综合复杂性和路线相似性的复杂范围。我们表明,通过仔细的复杂目标,多目标算法可以优于单目标搜索,并提供更多样化的解决方案。但是,对于许多靶标化合物,单目标设置是等效的。尽管如此,我们的算法为合成计划中的特定应用程序纳入了新的目标。

核小体呼吸促进了先锋转录因子
摘要:遗传信息的转移始于与DNA上特定位点结合的跨文字因子(TFS)。但在活细胞中,DNA主要被核小体覆盖。有蛋白质,称为先驱TF,可以有效地到达核小体隐藏的DNA位点,尽管不了解基本机制。使用最近提出的相互作用补偿机制的思想,我们开发了一个随机模型,用于核小体呼吸对DNA的目标搜索。发现,与没有呼吸的情况相比,核小体呼吸可以显着加速先锋TF的搜索。我们认为,这是相互作用补偿机制的结果,该机制使蛋白质可以通过外部DNA段进入内核小体区域。建议自然优化的先驱TFS利用核小体呼吸。所提出的理论图片为成功侵袭核小体埋藏基因提供了可能的微观解释。

化学科学-RSC出版
对于所有CAS蛋白和基于CAS蛋白的效果,第一个关键步骤是在复杂的细胞环境中将其正确的目标定位在众多非核C和o效位点之间。一般而言,DNA结合蛋白在溶液中结合了三维(3D)差异,并沿DsDNA轮廓沿溶液和一维(1D)差,并有效地在基因组DNA上搜索其认知位点。28 - 31个先前的研究已经确定了CAS9和Cas12a都结合了3D和1D差异,以有效地促进其目标搜索过程。32 - 36 1D在DsDNA上的蛋白质的1D差异通常是由重复的瞬态结合事件介导的,这是由它们之间的非特定C静电相互作用驱动的。尽管已经解决了其APO态或具有DNA和RNA的复合物中CAS蛋白的许多结构,但已解决了37 - 47瞬时CAS蛋白DNA结合结构域介导的1d DI驱动靶向搜索量较低。因此,工程介导的残留物介导1D CAS蛋白的1D差异从未被使用,甚至被测试为

机器学习和人力资源管理:有效劳动力管理的途径
自机器智能(ML)增加人力资源管理(HRM)以来,人力资本工作的发展既好又坏。本文介绍了人力资源管理财富,它面临的问题以及在这个地方AI和ML时代所提供的潜力。一开始,我们讨论了数据处理的变化如何改变了人力资源管理(HRM),重点是在变化的人力资源过程中,AI和机器智能的方式或机器智能的影响越来越大。有关这项研究的目标搜索了研究人类能力管理是什么,AI和ML如何影响它,AI和ML将如何影响任务以及在HRM中使用ML的优缺点。作品审查研究了有关人类财产管理的基本思想的出色细节。它专注于该领域如何从简单的政府任务到至关重要的努力到更好的成员幸福,产出和协会的幸福。在这一部分中,我们进一步讨论了AI和ML的方式或ML以什么方式交换了人力资源任务,例如引入,导演行为和计划受过训练的工人。人们检查了AI和ML如何改变HRM时,人们可以看到他们可以表现出家庭数据驱动的理解,使人力资源任务变得顺畅,并管理平稳以处理操作员并创建决策。,但为了在人力资源管理中最大程度地吸收机器智能,部分数据,错误数据和指导变更需要预期的固定。