XiaoMi-AI文件搜索系统
World File Search System目标距离
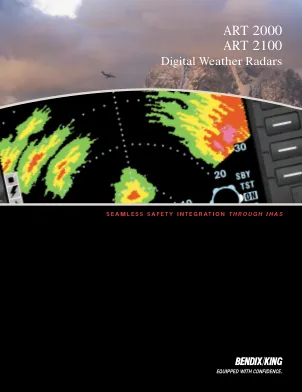
艺术 2000 艺术 2100
ART 2000 和 ART 2100 使用的直观颜色生动地描绘了天气状况,让您轻松避开危险的天气系统。使用灵敏度时间逻辑,系统将目标距离与强度关联起来,其衰减补偿可减少阴影。四种鲜艳的颜色(绿色、黄色、红色、洋红色)描绘天气强度。
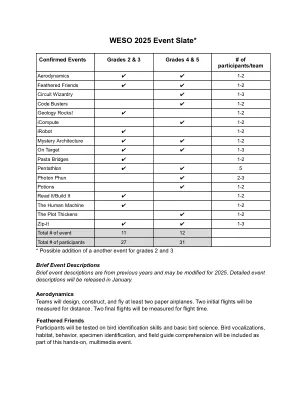
2025 WESO事件Slate/简短事件描述
在目标上,每个团队都使用精密吸管作为导弹主体,恰好建造了6枚导弹。导弹是在活动期间构建的,仅使用Weso提供的材料。导弹是在固定目标的室内发射的,每个参与者都有一个有机会发射的机会。使用团队三个最佳发射的导弹(距离目标距离)的准确性用于确定球队得分,与被视为获胜者的总距离最短。
普特洛斯军事训练区
• NBS C-RAM MANTIS • 使用飞行机枪/MANPADS 射击,例如 STINGER • 空中或防空射击 • 近距离空中支援 (CAS) 陆 / 海 • 飞机射击 (LFz) 空 - 海 • 管式火炮直接瞄准 • 管式火炮和火箭火炮对海上目标 • MARS 火箭火炮系统(目标距离>=15,000 m) • 迫击炮对陆地目标和海上目标 • 装甲/防护车辆上的机载武器(最大 120 mm) • 使用手持和反坦克手持武器进行训练和战斗射击 • 手榴弹发射场 • 高能激光 (HEL) 测试 • 反坦克制导导弹(MILAN、TOW、HOT、MELLS) • 从直升机上射击,例如 «Doorgunner» • 爆破范围,300 m 和 1500 m 以及水下爆破范围
美国陆军远程精确射击
扩展范围的加农炮炮(ERCA)计划计划开发一个能够准确向目标射击超过70公里的系统,这比当前系统的30公里目标距离有所改善。精密罢工导弹(PRSM)是从M270A1多发射火箭系统(MLR)和M142高移动性火箭火箭系统(HIMARS)发射的地表到表面,全天气,精确指导导弹。PRSM旨在替换当前的MLR和HIMARS导弹,并使当前的火灾持续一倍,每个发射吊舱有两枚导弹。陆军正在研究开发战略性远程大炮(SLRC)的可行性,该大炮可以以高达1,000英里的高速速度发射弹丸,以吸引防空,火炮,导弹系统以及指挥和控制目标。
fira财团(书面输入)
FIRA联盟是一个总部位于俄勒冈州的联盟,由领先的半导体制造商,消费电子制造商,物理访问安全公司和技术公司结盟,这些公司符合使用超宽带(“ UWB”)范围和定位技术来定义下一代位置和定位体验。代表“精细范围”的FIRA名称突出了UWB技术在测量到目标距离或确定位置时提供前所未有的准确性和安全性的独特能力。UWB技术可以改变和丰富人们使用无线电频谱的方式,以体验超出连接性的有益用例。它将为找到人员和设备的解决方案提供动力,促进导航和免提付款以及感知用例,包括检测到汽车中留下的儿童的车辆安全措施,增强了汽车钥匙的安全性,有助于减少自动盗窃以及对需要登录的建筑物或设备,这些用例对

基于电场的给药可改善非侵入性脑刺激
图1。e-field剂量在主题一级优于其他给药策略。(a)选择所有线圈位置以最大化皮质靶刺激。(b)基于电动机阈值(MT)(上排)的剂量在不同的皮质靶区域(柱)施加相同的刺激器强度,从而产生高度可变的皮质刺激强度(以每米的电压为单位; V/m)。“ Stokes”方法(中行)线性地调节了线圈到目标距离的刺激器强度,但仍会导致跨靶标的皮质刺激的次优匹配。e-field的给药(底行)为所有靶标提供相同的皮质刺激强度。颜色:| e |。百分比:MT刺激器强度的百分比。所有电子场均在灰质表面可视化,以示例性主题。(c)刺激器强度(上排)与皮质刺激暴露(底行)之间的关系在皮质靶标之间有很大不同。在皮质靶标上提取刺激暴露,并与MT强度下的M1暴露有关(“ 100%”)。

利用 DNA 纳米结构对生化反应进行空间条形码编码,揭示了邻近标记中的主要接触机制
TurboID 和 APEX2 等邻近标记技术已成为研究蛋白质相互作用的空间组学研究的关键工具。然而,这些反应性物种介导的标记背后的生化机制,尤其是亚微米范围内标记方法的空间模式,仍然知之甚少。在这里,我们利用 DNA 纳米结构平台通过体外测定精确测量 TurboID 和 APEX2 的标记半径。我们的 DNA 纳米标尺设计能够在酶附近以纳米精度部署寡核苷酸条形码标记靶标。通过使用定量 PCR 量化标记产量并将其与目标距离进行映射,我们发现了标记机制的惊人见解。与流行的扩散标记模型相反,我们的结果表明 TurboID 主要通过接触依赖性标记进行操作。同样,APEX2 在其直接接触范围内显示出高标记效率。同时,它对更远的酚表现出低水平的扩散标记。这些发现重新定义了我们对邻近标记酶机制的理解,同时突出了 DNA 纳米技术在空间分析反应物种方面的潜力。

对合并策略合并启发式策略的分析
引言启发式搜索是在大型状态空间中找到短路的常见方法,例如在最佳的古典计划中。最近提出的几项启发式方法使用合并框架(Dr'Ager,Finkbeiner和Podelski 2006; 2009; 2009; Helmert,Haslum和Hoffmann 2007; Helmert et al。2014),其中计划任务的原子抽象是逐渐组合的(合并了两个实体过渡系统)和简化的(缩小了一个差异过渡系统),直到剩下单个抽象为止,其目标距离然后诱导计划任务的启发性。在整个论文中,我们都对经典计划和合并和碎片框架进行了基本熟悉。由Sievers,Wehrle和Helmert(2014)提供了对合并框架最新探索的独立介绍。合并策略的合并策略的一个重要方面是确定在每个合并步骤中要组合的两个中间抽象。我们将使用以下术语:任务的合并策略由二进制树在任务的状态变量上定义。如果此树脱离列表,则称为策略,否则是非线性的(图1)。更普遍地说,当从文献中发表合并策略时,我们指的是(独立于领域的)算法,该算法为给定的计划任务生成合并策略。这样的al-gorithm被称为线性合并策略,并且仅当其产生的合并策略对于所有计划任务都是线性的。换句话说,非线性合并策略算法不是

辅助负荷促进以目标为导向的拉伸反射增益调节
自愿运动在执行前需要做好准备。人们已在整个中枢神经系统中观察到了准备活动,最近在人类周围神经系统(即肌梭)的一级神经元中也发现了准备活动。感觉器官中出现的变化表明,拉伸反射增益的独立调节可能是运动准备的重要组成部分。本研究的目的是进一步研究人类受试者优势上肢的短延迟拉伸反射反应 (SLR) 和长延迟拉伸反射反应 (LLR) 的准备调节。具体来说,我们研究了不同的目标参数(目标距离和方向)如何影响目标导向伸手的背景下拉伸反射增益的准备调节,以及任何此类调节是否取决于准备持续时间和背景负荷的方向。我们发现目标距离只会产生很小的反射增益变化。相比之下,SLR 和 LLR 增益都根据目标方向受到强烈调节,从而促进即将到来的自愿运动。当准备延迟足够长(> 250 毫秒)且同向肌肉未负重时,这种以目标为导向的 SLR 和 LLR 增益调节会出现或增强 [即,当背景负荷首次施加在同向肌肉动作方向(辅助负荷)时]。结果进一步支持了伸手准备中相对缓慢进化的过程,该过程可能通过独立控制肌腱运动神经元来调节反射性肌肉僵硬。这种控制可以增强自愿的目标导向运动,并在同向肌肉未负重时被触发或增强。