XiaoMi-AI文件搜索系统
World File Search System直线运动

Game-D:使用直线运动材料上的线跟随机器人开发教育游戏
摘要 — 本研究介绍了 Game-D,这是一款创新的教育游戏,旨在通过与线路跟踪机器人的互动来促进直线运动的学习。Game-D 以建构主义学习理论为基础,采用游戏化原则来提高学生对机器人技术和运动物理学基本概念的理解和记忆。Game-D 采用 ADDIE 模型(分析、设计、开发、实施和评估)的研发方法,经过一系列设计和测试阶段,以确保与教育目标和用户偏好保持一致。本研究的样本包括来自印度尼西亚马都拉 Trunojoyo 大学教师培训与教育学院科学教育研究项目的 34 名学生。分析结果表明,Game-D 符合高标准有效性和可靠性,平均有效性得分为 88.25%,被归类为非常有效,实用性得分为 87.3%,被归类为非常实用。此外,有效性测试获得了 86.25% 的高分,将游戏归类为非常有效。这些发现表明,Game-D 作为直线运动的学习媒介,具有高度有效性、实用性和有效性。这项研究证实,将线路跟踪机器人集成到教育游戏中可以提高学习质量,为支持教育过程提供可行的工具。媒体有效性测试表明,Game-D 显著提高了概念理解、学生积极参与和学习动机。这强调了 Game-D 作为支持直线运动学习的有效工具的作用,为成功的教育营造了一个动态和互动的学习环境。
9:00研讨会开放教授Ian Hickie Brain
物理学建议,如果您要首次进行物理学,需要在休息后刷新您的知识,或者尝试过物理学并发现它很难。本课程的目的是为主题提供良好的一般介绍,以便学生从年初开始更好地欣赏讲座和实验室材料,并介绍技能和内容。主题包括:测量和单位,沿直线运动,向量和2D和3D运动,力和运动,工作和能量,能量的保存,颗粒,碰撞和振荡的系统。
物理科学,生命科学与社会科学
•测量•沿直线运动•向量•运动•二维运动•力和运动 - i•力和运动 - •II•动力和工作•能量和工作•能量和能量的能量•质量和线性动量中心•旋转•旋转,扭矩,扭矩和角度,和角动量•平衡和弹性•稳定性•稳定性•旋转•旋转•挥发性•浪潮 - 浪潮 - 浪潮 - 浪潮,潮流,潮汐,潮流,浪潮,潮流,潮流,浪潮,热力学•气体动力学理论•熵和热力学的第二定律•库仑定律•电场•电场•电场•高斯•高斯定律•电势•电势•电容•电流和电阻•电流•电路•电路•磁场•由于磁场•磁场•电流和电感•电磁场•电子磁振荡和交替的当前电流•Maxwell•Maxwell•Maxwell•Maxwell•Maxwell的等式;物质的磁性•电磁波•图像•干扰•相对性•光子和物质波•更多关于物质波•关于原子的全部•关于原子的全部•固体中的电力•核物理•核物理•来自核的能量•夸克,leptons和大爆炸97893574460835 | `1149

按刀型计算土壤切割力...
摘要:在土方机械上应用斜切刀式无斗底卸转子,与推土机、平地机等广泛使用的机械相比,可显著提高土方机械在道路施工中的开挖量。给出了安装在无斗底卸转子上的斜切刀受力的载荷图。考虑了转子切刀逐层开挖土壤时,由于转子沿直线轨迹旋转运动和端部进给,切割元件在空间中产生的复杂运动,力的作用。获得了直线端部进给下无斗底卸转子单个斜切刀挖掘力分量的依赖关系。安装在土方机械框架上的斜切刀式无斗底卸转子直线运动,不仅可以通过无斗底卸转子的转速增加其输出,还可以挖掘现有土方机械无法挖掘的高硬度土壤。关键词:无膛线转子 下部卸载 斜切削 切削力 斜切削刀 1. 引言
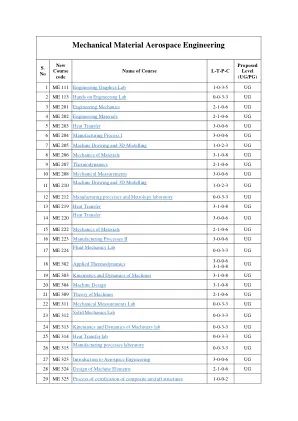
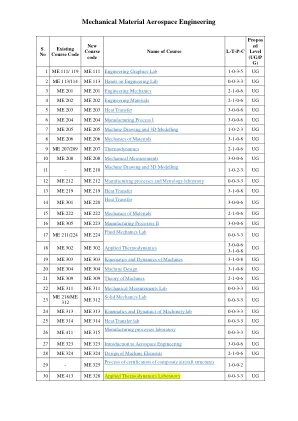
机械材料航空航天工程
模块 5:虚功和能量法- 虚位移、质点虚功原理和理想刚体系统、自由度。主动力图、有摩擦系统、机械效率。保守力和势能(弹性和重力)、平衡能量方程。能量法在平衡中的应用。平衡稳定性。模块 6:粒子动力学- 粒子运动学:直线运动、平面曲线运动 - 直角坐标、法向和切向坐标、极坐标、空间曲线 - 圆柱、球面(坐标)、相对运动和约束运动。粒子动力学:力、质量和加速度 - 直线和曲线运动、功和能量、冲量和动量 - 线性和角向;冲击 - 直接和斜向。粒子系统动力学:广义牛顿第二定律、功、冲量、能量和动量守恒定律 模块 7:刚体动力学简介 平面刚体运动学:刚体绕固定轴旋转的方程、一般平面运动、平面运动中的瞬时旋转中心、粒子相对于旋转框架的平面运动。科里奥利加速度平面刚体动力学:刚体运动方程、平面运动中刚体的角动量、刚体的平面运动和达朗贝尔原理、刚体系统、受限平面运动;作用于刚体上的力的能量和功、平面运动中刚体的动能、刚体系统、能量守恒、刚体的平面运动 - 冲量和动量、刚体系统、角动量守恒。

Trabajo FindeMáster-Riuma校长
滑动是一种运动系统,其特征是独立驾驶地面车辆的平行胎面。转弯需要向每个胎面命令不同的旋转速度,这激发了内部胎面在转弯中刹车的外部胎面,相反,该胎面被外部拖动。因此,外胎面滑动,即,它的进展要小于其旋转速度给出的位移,并且内部滑动,即它的旋转速度比预期的要多。当车辆在现场转动时,理想情况下,胎面速度相反,两个胎面上都会滑动。仅当两个胎面都具有相同的旋转速度时,不会发生滑动或打滑(在直线运动期间)。可以使用轨道或几个机械链接的轮子建造滑动车辆的胎面。主要区别在于它们与地面的接触斑,轨道比车轮要大得多,从而导致摩擦更高,并且在不规则的地形上具有更好的牵引力[1]。每侧的车轮数通常在两到四个之间变化,是胎面的行为,距离更接近轨道。由于它的机械简单性和高可操作性,载人[2]和无人驾驶[3]地面车辆通常都采用了滑动运动。滑动移动机器人的现场应用包括检查[4],采矿[5],农业[6] [7],搜救[8]和林业[9]等。尽管如此,这种机制意味着高功率要求[10] [11],并使动态建模更加复杂[12] [13]。此外,在倾斜的地形上运行[14] [15],
机械材料航空工程
模块5:虚拟工作和能量方法 - 虚拟位移,粒子的虚拟工作原理以及刚体的理想系统,自由度。主动力图,有摩擦的系统,机械效率。保守力和势能(弹性和重力),平衡的能量方程。能量法对平衡的应用。平衡的稳定性。模块6:颗粒动力学 - 颗粒的运动学:直线运动,平面曲线运动 - 矩形坐标,正常和切向坐标,极性坐标,空间曲率 - 圆柱 - 圆柱形,球形(球形(坐标),相对和约束运动。颗粒动力学:力,质量和加速度 - 直线和曲线运动,工作和能量,脉冲和动量 - 线性和角度;影响 - 直接和倾斜。颗粒系统动力学:牛顿的第二定律,工作能源,脉冲弹药,能量的保护,能量和动量模块7:刚体的刚性身体动力学介绍:刚体旋转的方程式,用于在固定轴上旋转固定轴旋转固定轴的固定平面,一般平面运动,旋转平面运动的旋转旋转的旋转旋转的旋转架子旋转的旋转旋转旋转的旋转。coriolis刚体刚体的加速动力学:刚体的运动方程,平面运动中刚体的角动量,刚体的平面运动和D'Alembert的原理,刚体的系统,刚体的系统,限制了平面运动;作用在刚体上的力和作用,平面运动中刚体的动能,刚体的系统,能量保护,刚体的平面运动 - 脉冲和动量,刚体的系统,刚体的系统,保护角动量。