XiaoMi-AI文件搜索系统
World File Search System矢量控制

推力矢量控制对纵向配平的有效性...
推力矢量是一种新型控制技术概念。它是指发动机推力线的偏转,以提供俯仰、滚转或偏航控制力矩或直接升力。与传统的气动控制面相比,推力矢量控制对动压的依赖性较小,能够在大迎角和失速后飞行条件下提供控制力矩。因此,推力矢量技术已应用于多种军用战斗机,以提高其机动性。只有少数人研究过推力矢量在民用运输机上的应用。需要进行量化研究,以寻找在民用运输机上应用推力矢量控制的潜在好处。
台达无传感器矢量控制紧凑型驱动器 VFD-EL ...
感谢您选择台达多功能 VFD-EL 系列。VFD-EL 系列采用高品质组件和材料制造,并结合了最新的微处理器技术。本手册用于交流电机驱动器的安装、参数设置、故障排除和日常维护。为保证设备安全运行,在将电源连接到交流电机驱动器之前,请阅读以下安全指南。请保留此操作手册并分发给所有用户以供参考。为确保操作员和设备的安全,只有熟悉交流电机驱动器的合格人员才能进行安装、启动和维护。在使用 VFD-EL 系列交流电机驱动器之前,请务必仔细阅读本手册,尤其是“警告”、“危险”和“小心”说明。未遵守规定可能会导致人身伤害和设备损坏。如果您有任何疑问,请联系您的经销商。请在安装前阅读安全须知。

建模气候和矢量控制干预措施对Arbovirus传播的影响
评估疾病传播昆虫媒介物的媒介能力的大多数数学模型通常集中于气候因素的影响,以预测不同时间和位置的变化,或检查矢量控制干预措施预测其潜在有效性的影响。我们结合了现有模型的特征,以开发一种考虑气候和矢量控制的媒介能力的新型模型。该模型考虑了向量控制工具如何影响矢量周期的每个阶段的向量,并结合了主机的可用性和偏好。将该模型应用于欧洲的兽医疗程重要性,我们表明,非洲马匹病毒病毒(AHSV)的峰值预测矢量能力高于Bluetongue Virus(BTV),Schmallenberg Virus(SBV)和Epizootic Haagotic Haagic疾病病毒(EHDV)。但是,由于死亡率高,AHSV的平均传染周期较短,因此AHSV的总体基本繁殖数与BTV相似。SBV和EHDV之间存在类似的关系,这两种病毒都显示出相似的基本繁殖数。专注于英国AHSV传播,经过杀虫剂处理的稳定网络被证明可以显着降低库里卡德的矢量能力,即使在较低的覆盖率下也可以降低。但是,未经处理的稳定网络可能会产生有限的影响。总体而言,该模型可用于考虑当前使用的气候和媒介控制干预措施,或者用于疫情潜在使用可以帮助指导寻求减轻气候变化对疾病控制的影响的政策制定者。

建模季节性对蚊子种群动态的影响:矢量控制策略的见解
蚊子是传播一些主要传染性人类(即疟疾,登革热,西尼罗河病毒和寨卡病毒)的重要载体。这些疾病的负担在不同地区的负担不同,在热带和亚热带地区,年度降雨量很高,温度温暖,季节性不太明显。蚊子的生命周期由四个不同的阶段组成:鸡蛋,幼虫,pup和成人。这些生命阶段的死亡率不同,只有成年人才能产生。季节性天气可能会影响蚊子的种群动态,以及不同蚊子阶段的相对丰度。我们开发了一个阶段结构的模型,该模型考虑了实验室实验,描述了温度和降雨如何影响不同的蚊子阶段的繁殖,成熟和存活,这是传播导致疟疾的寄生虫的物种。我们考虑季节性的温度和降雨模式,并描述Ain Mahbel,阿尔及利亚,开普敦,南非,内罗毕,肯尼亚和库马西,加纳的Ain Mahbel蚊子蚊子的舞台结构人群动态。我们发现,忽视季节性会导致大量高估或低估蚊子丰度。我们发现,取决于该地区,蚊子丰度:一年一年,两次或四次峰值,预计将发生在六个月(Ain Mahbel)到根本不到六个月(Nairobi)的持续时间。阶段相对丰度的季节性模式在近方不同。我们的分析揭示了不同月份和地区的蚊子丰度的不同模式。该地区的温度升高和一年较高的降雨量,预计加纳的库马西(Kumasi)的蚊子丰度较高,这与我们研究所依赖的其他国家相对于其他国家的疟疾死亡而言,这与据报道的疟疾死亡一致。控制策略通常以一个特定的生命阶段为目标,例如,应用幼虫杀死蚊子幼虫或喷洒杀虫剂以杀死成年蚊子。我们的发现表明,蚊子阶段结构的季节性天气差异,并且对矢量控制的最佳方法可能会在定时,持续时间和功效的区域之间有所不同。
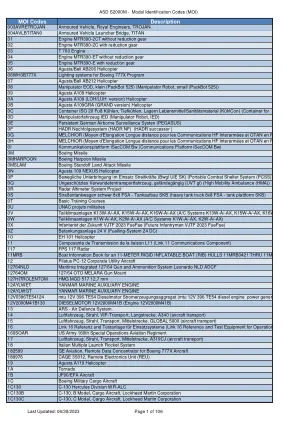
ASD S2000M - 型号识别码 (MOI) - NSPA
2K IRIS-T SL 中程地对空导弹系统 (红外成像系统 - 尾部/推力矢量控制表面发射) (IRIS-T SL 中程地对空导弹系统 (红外成像系统 - 尾部/推力矢量控制表面发射)

PowerFlex 700L 液冷交流变频器 - 文献库
• PowerFlex 700L 变频器专为从最简单的速度控制到最苛刻的扭矩控制的各种应用而设计,可与 PowerFlex 700 矢量控制或 PowerFlex 700S 控制一起使用。 • 出色的开环或闭环速度调节功能,适用于从风扇和泵到精确卷绕机控制的各种应用。 • 出色的扭矩产生和严格的扭矩调节功能,适用于挤出机、卷筒纸处理和试验台等要求苛刻的应用。 • 扭矩输入的快速更新时间适合高性能应用。 • 所有这些灵活性都可通过多种控制模式实现:V/Hz 控制、无传感器矢量、采用 FORCE 技术的矢量控制和永磁控制(仅限 700S 控制)。
ABB 驱动器 - 技术指南
直流电机驱动器 ................................................................................9 特点 ................................................................................................9 优点 ................................................................................................9 缺点 ................................................................................................10 交流驱动器 - 简介 ................................................................................10 交流驱动器 - 使用 PWM 进行频率控制 .............................................................11 特点 ................................................................................................11 优点 ................................................................................................12 缺点 ................................................................................................12 交流驱动器 - 使用 PWM 进行磁通矢量控制 .............................................................12 特点 ................................................................................................12 优点 ................................................................................................13 缺点 ................................................................................................13 交流驱动器 - 直接转矩控制 .............................................................................14 控制变量 .............................................................................................14 变速驱动器比较 .............................................................................

螺旋桨和机翼螺旋桨推力矢量 - eCommons
摘要 本研究调查了安装在螺旋桨尾流中的基于叶片的推力矢量系统的效率,该系统在净推力损失最小的情况下支持前向力。矢量系统本身既可以放置在独立螺旋桨配置中,也可以放置在机翼内螺旋桨配置中。代顿大学低速风洞 (UD-LSWT) 使用现成的 R/C 螺旋桨进行静态和基于风力的实验。灵敏度分析确定了叶片偏转角对推力矢量的影响以及螺旋桨相对于集成机翼上表面的位置对系统性能的影响。静态测试结果表明,当矢量设计放置在机翼中时,叶片性能显着改善。实现了推力矢量控制,随后俯仰力矩发生变化,在两种螺旋桨俯仰情况下,叶片偏转角逐渐增加:75° 和 90°。标准 90° 俯仰方向的集成式机翼螺旋桨系统的风洞试验结果显示,在前进比低于 0.3 时,推力矢量控制成功,这对于大多数相关应用而言都是实用的;螺旋桨叶片系统的 75° 俯仰方向观察到推力矢量控制能力扩展到 0.7 的前进比。敏感性分析表明,暴露在流动自由流中的螺旋桨的整体效率高于完全嵌入模拟机翼的螺旋桨,尽管嵌入式情况具有更好的推力矢量控制能力。致谢 衷心感谢亨利·卢斯基金会通过克莱尔·布思·卢斯 (CBL) 研究计划提供的支持。另一位重要的捐助者蔡杰龙先生(Jacky)对本作品在整个过程中给予的持续指导深表感谢。

56F80x 旋转变压器驱动器和硬件接口
旋转变压器驱动器利用 56F80x 的两个 ADC 通道和一个定时器。在此特定应用中,必须将 ADC 通道配置为同时采样正弦和余弦信号。定时器提供方波信号的生成。该信号进一步由外部硬件调节为便于激励旋转变压器的形式。控制器根据旋转变压器测量的正弦和余弦信号估计转子轴的实际角度。然而,控制器不仅专用于实现 R/D 转换,因此旋转变压器的软件驱动程序必须以能够链接并在现有应用程序(例如 PMSM 矢量控制应用程序)中运行的方式进行设计。
56F80x 旋转变压器驱动器和硬件接口
旋转变压器驱动器利用 56F80x 的两个 ADC 通道和一个定时器。在此特定应用中,必须将 ADC 通道配置为同时采样正弦和余弦信号。定时器提供方波信号的生成。该信号进一步由外部硬件调节为便于激励旋转变压器的形式。控制器根据旋转变压器测量的正弦和余弦信号估计转子轴的实际角度。然而,控制器不仅专用于实现 R/D 转换,因此旋转变压器的软件驱动程序必须以能够链接并在现有应用程序(例如 PMSM 矢量控制应用程序)中运行的方式进行设计。