XiaoMi-AI文件搜索系统
World File Search System碰撞

√sNN=2.4 GeV 时 HADES Au+Au 碰撞中质子和氘的定向和椭圆流
在耦合微观聚结模型的输运模型中,研究了√ s NN = 2 . 4 GeV时20-30% Au+Au碰撞中心性中质子和氘的有向和椭圆流及其标度特性。研究发现,用同位旋和动量相关的核平均场(不可压缩率K 0 = 230 MeV)模拟的流动及其标度特性与HADES数据有很好的拟合度,而常用的动量无关的核平均场(不可压缩率K 0 = 380 MeV)模拟的流动及其标度特性只能部分拟合HADES数据。此外,通过检查√ s NN = 2时0-10% Au+Au碰撞中心性中质子和氘的快度分布,发现质子和氘的快度分布与HADES数据有很好的拟合度。 4 GeV,我们发现,使用动量独立的核平均场模拟低估了氘的快度分布,而高估了质子的快度分布。相比之下,使用同位旋和动量相关的核平均场模拟的质子和氘的快度分布与 HADES 数据高度一致。我们的发现意味着,核平均场的动量依赖性是理解核物质特性和成功解释 HADES 数据的一个不可避免的特征。

氨基酰基-TRNA合成酶的基因组重复导致 通过电解质选择作者揭示了分子量对糖化聚噻吩混合传导的影响:joshua tropp,A,†dila 柔软的空中机器人,用于碰撞弹性和接触反应式栖息 以排为中心的控制在信号交叉点上建立在混合MPC系统,在线学习和分布式优化第II部分:理论分析 机器学习真正的判别基因座 chatel处理的CVD石墨烯的表面表征 多糖化期间的预言竞争-NSF -PAR II型WS2-RESE2异构结构及其电荷转移... 工程师人类多能干细胞衍生的天然杀伤细胞,带有Pd-l1 1 磁性碎片和双层量子旋转液体中的分数化金矿模式 成本效益分析,对个性化的,端的... 教学工业机器人技术的自适应沉浸式学习环境 1人口重建的遗传下降和恢复... 激光添加剂制造工艺开发用于矫尿酸盐热电材料 去甲肾上腺素能和胆碱能系统的神经调节作用及其在认知功能中的相互作用:重点综述 用于合成生物学应用的工程聚合酶 电子提交给ACS期刊的模板-NSF -PAR 深度学习的关系从建筑安全法规中提取 使用...
组氨酸生物合成的步骤(Sissler等,1999)。 与AS-A相反,HISZ仅在细菌156 中发现组氨酸生物合成的步骤(Sissler等,1999)。与AS-A相反,HISZ仅在细菌156

关于在立体电脑摄影手术计划中使用数字减法血管造影,以防止与血管发生碰撞
由于电极破裂而导致的脑内出血是最常见的并发症,每316个电极的发生率为1 [4,5]。为了防止它,神经外科医生必须仔细计划电极轨迹,以避免相交的血管。神经影像学检查对于在轨迹计划中揭示血管解剖学至关重要。Gadolinium增强的T1加权磁共振(T1-GD)是Seeg计划中最确定的技术之一,鉴于其可忽略不计的并发症率,可用性和易于性[6-9]。几种技术,例如血管造影或静脉磁共振成像(磁共振血管造影/磁共振造影),飞行时间成像,易感性加权成像或计算机断层造影术,为检测血管提供了卓越的敏感性,可用于检测血管,并在T1-gd [10-13]中均与SEEG计划相同。最详细的血管可视化是通过数字减法血管造影(DSA)实现的,允许对亚毫米船的明显可视化[14,15]。然而,这种技术的并发症发生率与使用动脉导管和高剂量的辐射有关[16]。最近的出版物强调了将DSA纳入SEEG工作流程[14,17-20]的好处,但不可忽略的并发症率使其常规用于易涉及的有争议[21-24]。

高能核碰撞中的集体激发——纪念刘联寿教授
集体流由动量空间中最终粒子分布的傅里叶展开的系数定义,对核碰撞的早期阶段很敏感。具体来说,前三个系数分别称为定向流 ( v 1 )、椭圆流 ( v 2 ) 和三角流 ( v 3 )。定向流对介质的状态方程 (EoS) 敏感;椭圆流对介质的自由度、部分子或强子能级和平衡度敏感;三角流对初始几何涨落敏感。在 RHIC-STAR 核碰撞实验中已经实现了一套全面的测量 [ 1 – 9 ]。在高能碰撞(> 20 GeV)中观测到的 vn 的组成夸克数 (NCQ) 标度表明部分子集体已经建立 [ 1 – 3 , 8 , 10 ]。特别地,D 介子也遵循 NCQ 标度 [ 2 , 10 , 11 ],这表明粲夸克集体与 u 、 d 和 s 夸克处于同一水平;因此,产生的介质达到(接近)平衡。束流能量扫描 (BES) 计划的主要动机是探索 QCD 相图并寻找可能的相边界和临界点。STAR 实验中 BES 计划的第一阶段 (BES-I) 涵盖碰撞能量 √ s NN = 7.7–62.4 GeV。已经观察到许多有趣的现象;在这里,我们重点关注集体流 vn 测量。图 1 总结了 STAR BES-I 的定向、椭圆和三角流相关观测结果。中速附近净重子的 v 1 斜率与碰撞能量的关系被认为是一级相变的可能信号。v 1 斜率的非单调能量依赖性与相变有关,v 1 斜率的最小值称为“最软点坍缩”[12]。在实验中,随着中子

√ s NN = 200 GeV 能量下 Au+Au 和同量级碰撞中轻强子定向流的流体动力学模拟 *
摘要:利用 (3+1)-D 流体动力学模型 CLVisc,我们研究了 200 GeV 下 Au+Au、Ru+Ru 和 Zr+Zr 碰撞中产生的轻强子的定向流 ( )。系统地研究了倾斜能量密度、压力梯度和沿 x 方向的径向流的演变。结果表明,初始火球的逆时针倾斜是最终轻强子定向流的重要来源。对 RHIC 中心和中中心 Au+Au 和等量异位素碰撞中的轻强子定向流进行了很好的描述。我们的数值结果显示,在不同碰撞系统中,轻强子具有明显的系统尺寸依赖性。我们进一步研究了原子核结构对定向流的影响,发现对于轻强子来说,对具有四极子变形的原子核来说,定向流不敏感。

具有不确定动力学的四四重无人机的安全导航,并保证使用屏障Lyapunov功能避免碰撞
在本文中,在存在干扰,静止和移动的障碍物的情况下,考虑了四摩托无人机(UAV)的安全自动运动控制。在这方面,我们直接将一种分析控制设计方法(在后台框架内)结合在一起,并避免了解决导航问题的障碍。将屏障Lyapunov功能(BLF)纳入了翻译控制中,以使车辆远离安全球,并在障碍物周围构建,同时将其转向所需的位置。BLF允许将障碍物位置直接包含在控制设计中。这是针对已知和未知障碍速度的情况而实现的。此外,在分析中解决了任意初始条件的问题,并从安全领域进行了预先分配的时间。我们还考虑了避免机会约束碰撞的情况。所提出的方法导致了计算上有效的设计,因为获得了控制的封闭形式,而无需实时优化。更重要的是,可以保证闭环系统的分析稳定性。在存在干扰的情况下,设计了一个层次控制结构,具有无适应性模型控制,用于未知态度动力学。进行了许多数值模拟,以评估所提出方法的有效性。

b'我们表明,与激光散斑相关的质动力可以以类似于库仑散射的方式散射激光产生的等离子体中的电子。给出了实际碰撞率的解析表达式。电子散斑碰撞在高激光强度或 \xef\xac\x81lamentation 期间变得重要,\xef\xac\x80影响长脉冲和短脉冲激光强度范围。例如,我们 \xef\xac\x81 发现国家点火装置空腔激光重叠区域中的实际碰撞率预计将超过库仑碰撞率一个数量级,从而导致电子传输特性发生根本变化。在短脉冲激光-等离子体相互作用的高强度特性下( I \xe2\x89\xb3 10 17 Wcm \xe2\x88\x92 2 ),散射足够强,导致激光能量直接吸收,产生能量缩放为 E \xe2\x89\x88 1 . 44 I/ 10 18 Wcm \xe2\x88\x92 2 1 / 2 MeV 的热电子,接近实验观察到的结果。 PACS 数字: PACS 数字。'
b'我们表明,与激光散斑相关的质动力可以以类似于库仑散射的方式散射激光产生的等离子体中的电子。给出了实际碰撞率的解析表达式。电子散斑碰撞在高激光强度或 \xef\xac\x81lamentation 期间变得重要,\xef\xac\x80影响长脉冲和短脉冲激光强度范围。例如,我们 \xef\xac\x81 发现国家点火装置空腔激光重叠区域中的实际碰撞率预计将超过库仑碰撞率一个数量级,从而导致电子传输特性发生根本变化。在短脉冲激光-等离子体相互作用的高强度特性下( I \xe2\x89\xb3 10 17 Wcm \xe2\x88\x92 2 ),散射足够强,导致激光能量直接吸收,产生能量缩放为 E \xe2\x89\x88 1 . 44 I/ 10 18 Wcm \xe2\x88\x92 2 1 / 2 MeV 的热电子,接近实验观察到的结果。 PACS 数字: PACS 数字。'
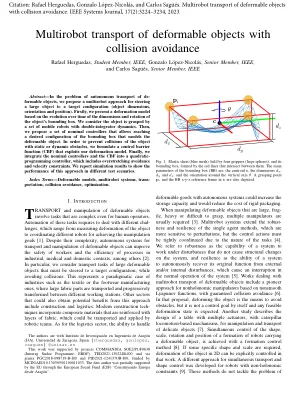
避免碰撞的可变形物体的多动物传输
摘要 - 在自动运输可塑造对象的问题中,我们提出了一种多机器人方法,将大对象转向目标配置(对象维度,方向和位置)。首先,我们基于对象边界框的尺寸和旋转时间的演化提出了一个变形模型。我们认为该对象是由一组带有双积体动力学的移动机器人抓住的。然后,我们提出了一组名义控制器,允许达到建模可变形对象的边界框的所需配置。为了防止对象与静态或动态障碍物的碰撞,我们制定了利用我们变形模型的控制屏障函数(CBF)。最后,我们将标称控制器和CBF集成到二次编程控制器中,其中包括过度拉伸的回避和速度约束。我们报告模拟结果,以显示在不同的测试方案中这种方法的性能。

适用于碰撞等离子体鞘层的无创实时离子能量分布监测系统的开发
摘要:随着基于低温等离子体的离子辅助表面处理的重要性日益增加,对撞击晶圆表面的离子能量的监测也变得十分重要。非侵入式、实时的、包括鞘层中离子碰撞的监测方法受到了广泛的研究关注。然而,尽管如此,大多数研究都是在侵入式、非实时、无碰撞离子鞘层条件下进行的。本文开发了一种基于离子轨迹模拟的非侵入式实时IED监测系统,其中采用蒙特卡洛碰撞方法和电模型来描述鞘层中的碰撞。我们从技术、理论和实验上研究了用所提出的方法对IED的测量,并将其与各种条件下通过四极杆质谱仪测量的IED的结果进行了比较。比较结果表明,随着射频功率的增加,IED没有发生重大变化,随着气压的增加,IED逐渐变宽,这与质谱仪的结果一致。

非马尔可夫碰撞模型中的熵产生
摘要:我们研究了在马尔可夫和非马尔可夫状态下,量子比特与微观碰撞模型建模的环境接触时产生的不可逆熵。我们的主要目标是为非马尔可夫动力学与负熵产生率之间关系的讨论做出贡献。我们采用了两种不同类型的碰撞模型,它们可以或不保留系统与进入的环境粒子之间建立的相关性,而它们都通过从环境到系统的信息回流而具有非马尔可夫性质。我们观察到,前一种模型(其中系统与环境之间的相关性得以保留)在瞬态动力学中产生负熵产生率,而后一种模型始终保持正熵产生率,即使与相应的马尔可夫动力学相比,收敛到稳态值的速度较慢。我们的结果表明,负熵产生率背后的机制不仅仅是通过信息回流的非马尔可夫性,而是通过已建立的系统-环境相关性对其的贡献。