XiaoMi-AI文件搜索系统
World File Search System站姿

高级研究站的名称
ANAND(IV)纳米技术系,AAU,AAU,ANAND 9 BIO-CORTOL研究实验室,AAU,AAU,ANAND 10 AINP关于脊椎动物害虫管理:农业鸟类学:AAU,AAU,AAU,ANAND研究站,主要校园附近1 Main Rice Research Station,AAU,NAWAGAM 2 MAIN LINAL REANCHER 2 MAIM IAL研究站4塔斯拉AAU灌溉作物的农业研究站5脉冲研究站,AAU,VADODARA,VADODARA 6帕迪研究站,AAU,AAU,DABHOI,DABHOI 7个部落研究中心,AAU,AAU,Devgadhbaria 8农业研究站Khambholaj AAU农业和园艺研究站
牙科职业中的人体工程学问题-牙医...
背景/目的:牙科专业人员罹患肌肉骨骼疾病的风险较高。以不自然的姿势工作是罹患肌肉骨骼疾病的主要风险因素之一。本研究旨在记录牙医在典型牙科工作过程中的背部倾斜度。材料和方法:为了监测身体倾斜度,安装了高性能传感器系统、三轴数字 12 位加速度计 LIS3LV02(SGS-Thomson Microelectronics,美国)。在进行牙科工作时,对十名牙医的身体倾斜度进行了测量。结果:在坐姿牙科工作期间,74% 的时间背部倾斜超过 20 度,而站姿工作期间则为 62%。参与者在进行牙科检查时向左侧倾斜。坐着时,65% 的时间向左侧倾斜大于 20 度,而站姿工作期间则为 50%。结论:背部倾斜超过 20 度是导致 MSD 发展的主要风险因素之一。牙医在站立和坐姿日常工作中身体在前后和内外方向的倾斜度都超过 20 度。根据这些事实,牙医在日常工作过程中面临患上肌肉骨骼疾病的风险。据此,牙科人体工程学是一个需要更多关注的研究领域。在日常牙科工作中实施人体工程学原则可提高工作绩效、满意度、效率和

智能采煤机器人关键技术
摘 要: 采煤机是综采工作面的核心装备,研发智能采煤机器人是实现综采工作面智能化的关键。 综合分析当前采煤机机器人化研究进程中的传感检测、位姿控制、速度控制、截割轨迹规划与跟 踪控制等技术的研究现状,提出研发智能采煤机器人必须破解的 “ 智能感知、位姿控制、速度控制、 截割轨迹规划与跟踪控制、位 − 姿 − 速协同控制 ” 五大关键技术,并给出解决方案。针对智能感知 问题,提出了构建智能感知系统思路,给出了智能采煤机器人智能感知系统的架构,实现对运行 状态、位姿、环境等全面感知,为智能采煤机器人安全、可靠运行提供保障;针对位姿控制问题, 提出了智能 PID 位姿控制思路,给出了改进遗传算法的 PID 位姿控制方法,实现了智能采煤机器 人位姿精准控制;针对速度控制问题,提出了融合 “ 力 − 电 ” 异构数据的截割载荷测量思路,给出 了基于神经网络算法的截割载荷测量方法,实现了截割载荷的精准测量;提出牵引与截割速度自 适应控制思路,给出了人工智能算法牵引与截割速度决策方法和滑模自抗扰控制的牵引与截割速 度控制方法,实现了智能采煤机器人速度精准自适应控制;针对截割轨迹规划与跟踪控制问题, 提出了截割轨迹精准规划思路,给出了融合地质数据和历史截割数据的截割轨迹规划模型,实现 了截割轨迹的精准规划;提出了截割轨迹精准跟踪控制思路,给出了智能插补算法的截割轨迹跟 踪控制方法,实现了智能采煤机器人截割轨迹高精度规划与精准跟踪控制;针对 “ 位 − 姿 − 速 ” 协同 控制问题,提出了 “ 位 − 姿 − 速 ” 协同控制参数智能优化思路,给出了基于多系统互约束的改进粒子 群 “ 位 − 姿 − 速 ” 协同控制参数优化方法,实现了智能采煤机器人智能高效作业。深入研究五大关键 技术破解思路,有利于加快推动研发高性能、高效率、高可靠的智能采煤机器人。
NIWC 大西洋站的经济影响
执行摘要 本研究旨在完成海军信息战中心大西洋 (NIWC Atlantic) 对美国的全面经济影响分析。作为美国海军部的一部分,NIWC Atlantic 的主要目的是设计和部署先进的通信和信息系统,为国防服务。这包括在开发和实施支持各种军事行动的 C4ISR(指挥、控制、通信、计算机、情报、监视和侦察)解决方案方面提供重要的工程和技术支持。NIWC Atlantic 在美国六个州设有设施,在全国经济中占有重要地位。这些影响可以通过直接创造就业机会和收入以及支持由美国数千家企业组成的庞大供应商网络的采购工作来观察。此外,NIWC Atlantic 积极推动有助于维持长期经济增长的技术发展。本研究的主要发现如下:

供水站水泵更新工程
(8) (8) (8) (8) (8) (8) 如果图纸和规范的内容存在差异,或者没有明确说明或有疑问,则应与监理人员协商确认内容。 如果图纸和规范的内容存在差异,或者没有明确说明或有疑问,则应与监理人员协商确认内容。 如果图纸和规范的内容存在差异,或者没有明确说明或有疑问,则应与监理人员协商确认内容。 具体内容将经讨论后予以确认。 具体内容将经讨论后予以确认。 具体内容将经讨论后予以确认。 具体内容将经讨论后予以确认。 具体内容将经讨论后予以确认。 具体内容将经讨论后予以确认。 对于本规范和设计文件中未提及但从技术角度自然需要的事项,对于本规范和设计文件中未提及但从技术角度自然需要的事项,对于本规范和设计文件中未提及但从技术角度自然需要的事项,对于本规范和设计文件中未提及但从技术角度自然需要的事项,对于本规范和设计文件中未提及但从技术角度自然需要的事项,对于本规范和设计文件中未提及但从技术角度自然需要的事项,对于本规范和设计文件中未提及但从技术角度自然需要的事项,费用应由承包商承担。 该项工作的费用应由承包商承担。 该项工作的费用应由承包商承担。 该项工作的费用应由承包商承担。 该项工作的费用应由承包商承担。 该项工作的费用应由承包商承担。 该项工作的费用应由承包商承担。
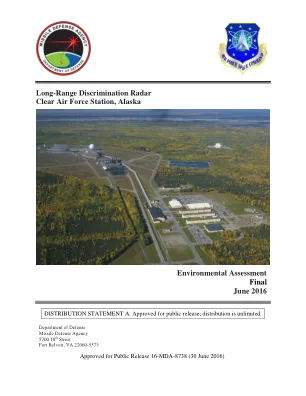
远程识别雷达清晰空军站...
拟议行动和替代方案的描述:拟议行动是在太平洋地区的 CAFS 建造和运行一个导弹防御雷达系统综合体,该系统将支持 LRDR 和指挥与控制组件。拟议行动将包括任务关键型、任务支持和非任务支持设施。任务关键型设施将包括任务控制设施、LRDR 设备掩体和地基、具有安全边界的入口控制设施、限制周界和动物控制围栏、发电厂和燃料储存系统。任务支持设施将位于禁区之外,包括维护设施、校准天线和基础设施。非任务 LRDR 特定支持设施将包括为 LRDR 操作人员建造的新宿舍、为新宿舍建造的新蒸汽加热装置、对新宿舍饮用水设施和相关蒸汽加热装置的维修和部分更换,以及对进入设施的 Clear Road 进行维修(铣刨和覆盖)。除了非任务 LRDR 特定行动外,还将实施几项非任务非 LRDR 支持设施和活动,包括新建消防站、合并土木工程设施、主门(车道拓宽)改进以及拆除以前的弹道导弹预警系统雷达和相关设施。基础设施将包括电力服务,包括现场变电站、水、下水道、铺路、人行道、雨水排水、消防和报警系统、电信接入点和信息管理系统。
Nucleus 寻呼站 - 中继器生成器®
本手册中的信息已经过准确性审查。但是,对于不准确的信息,我们概不负责。摩托罗拉保留对本文中讨论的任何产品进行更改的权利。本文档中的信息如有更改,恕不另行通知。摩托罗拉对因本手册中的错误或遗漏而导致的硬件或软件损坏或数据丢失不承担任何责任。摩托罗拉不承担因应用或使用本文中描述的任何产品或电路而产生的任何责任。摩托罗拉也不转让其专利或他人权利的任何许可。