XiaoMi-AI文件搜索系统
World File Search System类自

海外垂类AI专题(5)
• 微软四季度表示Azure收入的6%来自AI贡献,季度收入达10亿美金,实现了过去连续三个季度的翻倍增长; • ServiceNow四季度剩余履约义务cRPO +23%高于业绩会指引2pct,一半是由净新年度合同ACV驱动,其中主要因为客户AI兴趣浓厚; • Palantir表示AI拉动商业客户增长新周期,四季度商业收入同比+32%,远高于22年+15%的增长,尤其美国区商业收入同比增 长+70% ; • Crowdstrike四季度年度ARR同比+34%至34.4亿美元,净新增ARR增长快速,预计2028年AI原生安全平台TAM 2250亿美元;
结直肠癌类器官的构建与应用
结直肠癌(CRC)是最常见的恶性肿瘤之一,对人类健康构成了严重威胁。结直肠癌类器官是通过从患者中提取肿瘤细胞并结合三维培养技术来建立实验室的微型肿瘤模型。与传统的二维培养系统相比,大肠癌器官可以保留原发性肿瘤的分子特征和细胞组成,并模拟培养环境中实际肿瘤的生物学特征和组织结构。因此,类器官已成为癌症生物学,药物筛查和个性化治疗领域的重要研究工具,并显示了广泛的应用前景。本文回顾了结直肠癌类器官的研究进展,详细讨论了器官的培养条件,并总结了其在结直肠癌建模,CRC Organoid Biobank构造,药物筛查,毒性评估和个性化治疗中的应用。进步。通过这些内容,本文旨在为结直肠癌器官技术在基础研究和临床治疗中的进一步应用提供有用的参考和参考。

智能时代的脑科学与类脑智能研究
张鑫. 智能时代的脑科学与类脑智能. 中国科学院院刊, 2024, 39(5): 840-850, doi: 10.16418/j.issn.1000-3045.20240305003.

基于DTI-ALPS方法评估神经系统疾病类淋巴 ...
维持中枢神经系统的体内平衡。近年来,沿着血管周围空间(DTI-ALP)的扩散张量图像分析已成为一种有价值的非侵入性想象技术,用于评估各种神经系统疾病中的GS功能。从DTI-ALP中得出的Alps索引可以捕获与这些疾病相关的动态变化。本文回顾了GS的结构和功能,DTI-ALP的原理和好处及其在神经疾病中的应用,旨在提供监测疾病进展,评估治疗效率并预测神经疾病的预后的参考。

2022年脑科学与类脑智能发展态势
[1] 韩雪 , 阮梅花 , 王慧媛 , 等 . 神经科学和类脑人工智能发 展 : 机遇与挑战 . 生命科学 , 2016, 28: 1295-307 [2] Ngai J. BRAIN 2.0: transforming neuroscience. Cell, 2022, 185: 4-8 [3] Mehonic A, Kenyon AJ. Brain-inspired computing needs a master plan. Nature, 2022, 604: 255-60 [4] European Brain Research Area. European Research Inventory and Mapping Report[EB/OL]. (2022-02-15) [2023-01-09].https://www.neurodegenerationresearch. eu/2022/02/ebra-releases-mapping-report-investment- in-european-brain-research-still-vital/ [5] Canadian Brain Research Strategy. Brain Research Must Be a National Priority for the Social, Health, and Economic Advancement of Canada[EB/OL]. (2022-10- 07)[2023-01-09]. https://www.ourcommons.ca/Content/ Committee/441/FINA/Brief/BR11979145/br-external/ CanadianBrainResearchStrategy-e.pdf [6] Canadian Brain Research Strategy. Recruitment for CBRS Indigenous Engagement Sessions[EB/OL].(2022-09-20) [2023-01-09]. https://canadianbrain.ca/recruitment-for- indigenous-engagement-sessions/ [7] Brain/MINDS Beyond expands to the international project for primate brain connectome[EB/OL]. (2022-09-30) [2023-01-09]. https://brainminds-beyond.jp/news/2022/ 09/post_21.html [8] Thiebaut de Schotten M, Forkel SJ. The emergent properties of the connected brain. Science, 2022, 378: 505-10 [9] Axer M, Amunts K. Scale matters: the nested human connectome. Science, 2022, 378: 500-4
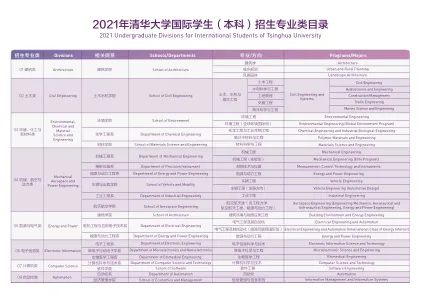
2021年清华大学国际学生(本科)招生专业类目录
注意:1。tsinghua通过部门允许国际学生参加本科课程。大多数分区的学生将在第一个学年接受他们分区的一般课程。在第一个学年结束时,将确认特定的计划/专业。在第二学年,学生进入相关学校/部门进行大型研究。2。有关每个部门的详细信息,确认方法和特定计划/专业的时间,请参阅以下网站:http://join-tsinghua.edu.cn.cn/publish/publish/bzw2019/12173/index.html。3。将在官员入学时最终确定部门,学校/部门和计划/专业的清单。该部门内的特定计划/专业均需进行调整。注册后请相应地参考更新的列表。


本文综述了结构磁共振成像在常见神经精神类疾病中的应用
[3] LIBOWITZ MR,WEI K,TRAN T,et al.Regional brain volumes relate to Alzheimer's disease cerebrospinal fluid biomarkers and neuropsychometry:A cross-sectional,observational study[J].PLoS One,2021,16(7):e0254332.[4] 王含春 , 汪群芳 , 罗长国 , 等 .磁共振薄层扫描结合人工智能脑结构分割技术分析海马体积辅 助诊断脑小血管病认知功能障碍 [J].全科医学临床与教育 ,2024,22(3):208-211.[5] 姜华 , 宛丰 , 吕衍文 , 等 .2 型糖尿病伴认知功能障碍患者基于体素的脑形态学 MRI 研究 [J].中 国 CT 和 MRI 杂志 ,2018,16(4):22-25.[6] 景赟杭 , 郭瑞 , 常轲 , 等 .2 型糖尿病性认知功能障碍脑结构 MRI 成像研究进展 [J].延安大学学 报(医学科学版) ,2024,22(1):88-91,107.[7] 郭浩 , 和荣丽 .磁共振成像对老年性痴呆患者海马解剖结构的评估价值研究 [J].磁共振成 像 ,2022,13(8):75-79.[8] 罗财妹 , 李梦春 , 秦若梦 , 等 .阿尔茨海默病谱系患者的海马亚区体积损害特征 [J].中风与神经 疾病杂志 ,2019,36(12):1097-1101.[9] 冯伦伦 , 金蓉 , 曹城浩 , 等 .阿尔茨海默病患者认知功能减退的海马亚区结构改变分析 [J].临床 放射学杂志 ,2022,41(10):1819-1824.[10] WEI Y,HUANG N,LIU Y,et al.Hippocampal and Amygdalar Morpho logical Abnormalities in Alzheimer,s Disease Based on Three Chinese MRI Datasets[J].Curr Alzheimer Res,2020,17:1221-1231 . [11] ESTEVEZ S S,JIMENEZ H A,ADNI G.Comparative analy sis of methods of volume adjustment in hippocampal volumetry for the diagnosis of Alzheimer disease[J].Neuroradiol,2020;47(2):161-5.[12] 曾利川 , 王林 , 廖华强 , 等 .结构与功能磁共振成像在轻度认知障碍及阿尔茨海默病中的应 用 [J].中国老年学杂志 ,2021,41(13):2902-2907.[13] KODAM P,SAI S R,PRADHAN S S,et al.Integrated multi-omics analysis of Alzheimer's disease shows molecular signatures associated with disease progression and potential therapeutic targets[J].Sci Rep,2023,13(1):3695.[14] 黄建 , 王志 .复杂网络分析技术在阿尔兹海默症患者脑结构和功能影像中的应用进展 [J].中 国医学物理学杂志 ,2024,41(8):1053-1055.[15] JELLINGER K A.The pathobiological basis of depression in Parkinson disease:challenges and outlooks[J].J Neural Transm(Vienna),2022,129(12):1397-1418.[16] BANWINKLER M,THEIS H,PRANGE S,et al.Imaging the limbic system in Parkinson's disease-A review of limbic pathology and clinical symptoms[J].Brain Sci,2022,12(9):1248.[17] 程秀 , 张鹏飞 , 王俊 , 等 .小脑结构与功能磁共振成像在帕金森病中的研究进展 [J].磁共振成 像 ,2022,13(4):146-149.[18] CUI X,LI L,YU L,et al.Gray Matter Atrophy in Parkinson's Disease and the Parkinsonian Variant of Multiple System Atrophy:A Combined ROI-and Voxel-Based Morphometric Study[J].Clinics(Sao Paulo),2020,75:e1505.[19] LOPEZ A M,TRUJILLO P,HERNANDEZ A B,et al.Structural Correlates of the Sensorimotor Cerebellum in Parkinson's Disease and Essential Tremor[J].Mov Disord,2020,35(7):1181-1188.[20] 鲍奕清 , 王二磊 , 邹楠 , 等 .帕金森病伴疲劳患者的大脑功能与结构磁共振成像研究 [J].临床 放射学杂志 ,2024,43(8):1265-1270.[21] 邹楠 , 王二磊 , 张金茹 , 等 .帕金森病伴疼痛患者大脑皮层厚度改变的结构 MRI 研究 [J].磁共 振成像 ,2024,15(5):13-18,23.[22] 屈明睿 , 高冰冰 , 苗延巍 .帕金森病伴抑郁在脑边缘系统结构及功能改变的 MRI 研究进展 [J].磁共振成像 ,2023,14(12): 127-131.

三维导电聚合物微纳电极在脑类器官研究中的应用与展望
在脑类器官中[58]。 (f)TPP制造光子晶体微纳米传感单元[59]。 (g)成像在脑类器官中[58]。(f)TPP制造光子晶体微纳米传感单元[59]。(g)成像