XiaoMi-AI文件搜索系统
World File Search System系留

采用交叉轨道飞行系留卫星系统的分布式空间雷达探测器
本文旨在分析两种可能的系留卫星系统架构的性能,这些系统用作分布式雷达探测仪的平台。第一种架构是横向轨道定向的系留卫星系统,利用与低地球轨道稀薄大气相互作用产生的空气动力进行控制和稳定。第二种架构涉及通过陀螺稳定控制的系留卫星系统,通过使系统围绕轨道平面内的轴旋转来实现。在简要介绍雷达探测技术之后,介绍了描述系统几何形状及其特性的方法,然后将这两种架构的性能相互比较并与当前最先进的技术进行比较。通过分析建模的标称行为,结果表明,这两种提出的架构可以在一个轨道内分别以最大横向轨道分辨率实现连续或多次观测,从而最大限度地减少杂波噪声。与通常每条轨道只能实现最多四次观测的编队飞行架构相比,这是一种显著的性能改进。最后研究了每种架构的优缺点,并讨论了其可能的任务场景。

优化系留高空平台地面控制站的电池维护和可靠性
本文介绍了一种集成系统,通过战略性地管理 k-out-of-n :G,COLD 系统中电池的修复和补充,确保系留高空平台系统 (HAPS) 不间断电源供应。我们假设电池是相同的,它们的寿命彼此独立且呈指数分布。电池因故障而独立劣化并等待修复。当工作电池数量减少到 L ð L < n Þ 时,修复设施启动,当运行电池数量下降到 N ð N < L Þ 时,下达 n −k + 1 块电池的补货订单。我们推导出系统状态概率的显式解并分析关键性能指标。此外,我们采用粒子群优化 (PSO) 算法来确定所提优化问题的最佳成本,并使用 Morris 方法进行灵敏度分析。结果为 HAPS 的有效电池管理策略提供了见解,确保可靠的电源供应同时最大限度地降低成本。 [DOI: 10.1115/1.4067545]

使用非递归和递归刚体动力学的高效系留气球模型公式
推荐引用 推荐引用 Hembree, Bradley C.,“使用非递归和递归刚体动力学的高效系留气球模型公式”(2010 年)。学位论文。260。https://louis.uah.edu/uah-dissertations/260
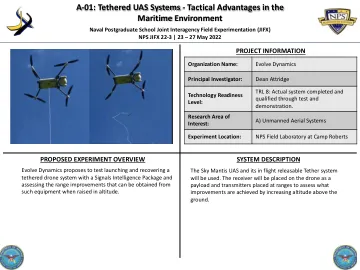
系留 UAS 系统 - 海上战术优势...
GreenSight LEANIS 系统是一种模块化多无人机发射和回收系统,专为高动态移动平台而设计,例如在高海况或崎岖地形上高速行驶的小型无人或载人船舶和地面车辆。主要子系统包括多架长航时 GreenSight Dreamer 无人机、多自由度机械臂、可堆叠的无人机存储和充电舱、无人机跟踪传感器、通信和计算单元以及电源单元。LEANIS 的突出功能是它能够在高动态平台上运行,使用机载惯性传感器和机械臂来取消车辆的运动,为无人机提供稳定的连接点。此功能使 LEANIS 能够快速自主地发射和回收整个无人机群,而不会中断车辆上的现有操作。

TEPCE:系留电动推进立方体卫星……
TEPCE 是一颗 3U 立方体卫星,旨在探索使用电动力推进航天器的可行性。推进力是通过沿着连接两个航天器末端质量的长线(称为系绳)传导电流产生的。当航天器沿其轨道移动时,地球磁场会在磁场和系绳中的电子之间产生洛伦兹力,从而为航天器提供推力。它不需要化学或其他传统燃料源。TEPCE 是首批自给式电动力推进航天器之一。TEPCE 于 2019 年 6 月 25 日搭载 SpaceX Falcon Heavy 火箭发射。这是一艘成功的航天器,展示了可使航天器利用电动力学原理进行机动的机械和电气系统。

使用无人驾驶飞行器控制的系留单波束声纳对内陆水体进行水深观测
1 丹麦技术大学环境工程系,Kgs. Lyngby,丹麦。 2 丹麦技术大学国家空间研究所,Kgs. Lyngby,2800,丹麦。联系人:Filippo Bandini (fban@env.dtu.dk) 10
使用无人驾驶飞行器控制的系留单波束声纳对内陆水体进行水深观测
1 丹麦技术大学环境工程系,Kgs。丹麦林比。2 丹麦技术大学国家空间研究所,Kgs。丹麦林比,2800。联系人:Filippo Bandini (fban@env.dtu.dk) 10