XiaoMi-AI文件搜索系统
World File Search System缝线

Progressive QHP-905 - 快乐刺绣机
问题。 * 故障查找 自诊断故障查找系统。在 LCD 上识别故障并提出解决方案。 * 喷嘴定位 改进的喷嘴安装和移动系统。喷嘴可以非常准确地定位。 * 跳封 滚轮反转的全功能控制。防止“跳封” * 速度设置。(选项)用于临时减速的系统,以协助交叉密封。 * 上辊。(选项)用红外传感器加热,实现精确的温度控制。 * 下辊(选项)用红外传感器加热,实现精确的温度控制。 * 柱选项。(选项)小直径“鞋柱”下辊。 * 胶带送料。(选项)电动胶带送料系统。防止卷轴上的张力/阻塞。 * 点标记装置(选项)点标记引导胶带切割时间/接缝线。

多参数 MRI 评估对对流反应...
将神经导航序列导入 Brainlab Curve-100 工作站后,在立体定向引导下精确放置 CED 导管。使用“概览”视图为微创轨迹规划两个入口点,以开发目标复发性肿瘤及其周围神经和血管结构的 3D 模型。将导管固定在 14 French Foley 导管(红色橡胶管)中,然后用 3-0 尼龙(Neurolon)缝线缝合刺伤,并将患者转移并插管至 MRI 套件 [图 1]。通过 MRI 期间钆的释放确认导管位置理想 [图 2]。患者对手术的耐受性良好,术后神经系统完好无损。在神经重症监护室对导管进行密切监测,并按照方案以 0.5 ml/h 的速度输注 MDNA55。
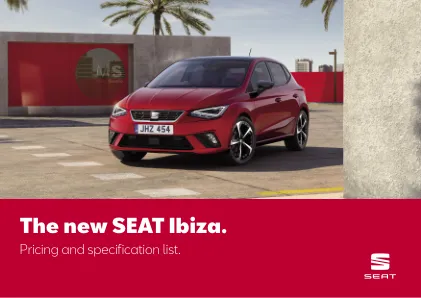
新的座位ibiza。
轮毂和轮胎•17英寸的合金轮毂,亮丽的银色外部设备中•深色的后窗•可调节,折叠和加热的门镜•独家的FR后保险杠•带有动态的大灯射程控制,即将到来的LED大灯,启动和离开家居的灯光和带有家用的日常运行灯和LED灯光灯•后面的尾灯•型号•置于式式型式型式型号•隔间式隔离式隔间,隔开式的隔间式互联网,隔间隔开式互联网,互联网互联网,旋转式隔离式,旋转式旋转式,旋转式旋转型,旋转式,旋转式,旋转式,旋转式,细节,黑色头条新闻•皮革方向盘(平底,带红色缝线和FR徽标的穿孔)和皮革齿轮旋钮和手刹•发光的红色空气通风口环绕•运动座椅

形状记忆聚合物及其生物医学应用
在本章中探讨了形状记忆聚合物(SMP)及其潜在应用的多功能性,特别着眼于它们在生物医学领域中的有前途的作用。SMP以其在特定刺激下经历形状变化的能力而闻名,由于它们在创建高级软机器人,促进可重复的驱动并启用多功能医疗设备方面的潜力而受到了吸引力。在生物医学领域中,SMP引起了重大兴趣,在不同地区找到了应用,例如可自使部支架,药物输送系统,自晶缝线,组织工程脚手架等。这些材料提供了微创使用,生物降解性,结构支持和受控治疗剂释放的优点。尽管这些发展有很大的希望,但本章强调了评估生物相容性,降解率和功能持续时间以进行安全实施的重要性。在一个前瞻性笔记上,本章强调了SMP在最小的侵入性程序中所扮演的重要作用及其在塑造生物医学应用未来的持续发展。

石墨烯超层压板是首选的领先的系绳材料!彼得·斯旺(Peter Swan),博士,2024年4月8日
•“用于构建空间电梯的合适材料,似乎在手头附近有三种材料可供选择,自发现以来,每种材料都在迅速发展。必须增加这些材料的样本量,以便可以进行详细的机械,电和热测试。鉴于现在已知的,石墨烯超层压板似乎是最好的选择,硝化氢硼可以替代。” [2]•“为太空电梯的绳索质量材料制造仍然需要更多的开发,但是高质量工业产品的轨迹很明显。认为,随着该石墨烯过程的持续发展,使用石墨烯作为其材料,太空电梯的生产可能会在五到10年内开始。” [1]•“工业规模的制造方法可能会在制造空间电梯束缚所需的尺度和速度下产生多晶而不是完美的单晶石墨烯。这项工作表明,只要材料具有缝线良好且几乎没有缺陷的晶粒边界,当前的制造方法可以使石墨烯具有足够强大的石墨烯,以使太空电梯束缚。” [3]未来
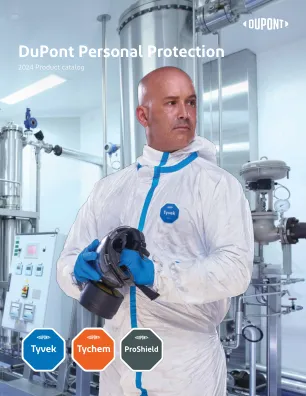
dupont®个人保护2024产品目录
*液体屏障性能根据衣服上可能获得的液体,液体在衣服上的时间长度,施加的压力和某些物理特性而变化。tyvek®和proshield®服装在使用过程中不合适(液体滴落或运行,或者湿润),或者如果在保护性服装下戴的皮肤或服装上观察到斑点。缝隙和结合的接缝会被某些危险的液体化学物质(例如强酸)降解,并且在存在这些化学物质时不应佩戴。Tyvek®600和Tyvek®500服装使用一种特殊类型的Tyvek®织物,与标准Tyvek®服装中使用的织物相比,它具有不同的物理特性和改善的耐化学性能。此外,标准Tyvek®服装中使用的接缝不同于Tyvek®600和Tyvek®500服装的接缝。Tyvek®600服装提供缝制然后胶带的接缝,Tyvek®500服装提供外部衬衫,其中可在服装外面看到接缝线。Tyvek®500和Tyvek®600提供改进的液体屏障,但如果在保护性服装下戴的皮肤或服装上观察到斑点,则可能不合适。在需要较高液体屏障的应用中,考虑Dupont™Tychem®2000和Tychem®4000件带胶带接缝的服装。

通过使用辅助电线(安全颠簸和对峙针迹)
需求是由于粘合材料不良,非平板粘合表面,奇数包装情况还是仅仅是由于对高可靠性的需求;通过正确使用辅助电线,通常可以大大提高线键互连的完整性。辅助电线定义为安全线,安全凸起或隔离针迹(又称凸起的针迹)。旧的待命安全线已经成为一项资产已有几十年了,但是,这被安全颠簸所取代,安全性需要较小的第二键终止区域。此外,僵持针迹(SOS)具有更多的应用程序,并且还具有许多侧面好处,可以将其纳入电路设计中,以获得更好的电线强度性能,更少的互连(死于死亡结合)和较低的环路。隔离针键键合涉及将球碰撞放置在电线互连的一端,然后将电线与另一个球放在互连的另一端,并在先前放置的球碰撞上缝线。这会导致几乎均匀的针键键互连到颠簸,并具有固有的针键键拉力强度的改善。SOS的另一种用途是反向键(在模具键垫上的颠簸上的针键键),通常会导致比标准前向线环的较低的环轮廓,并且环路更强,因为电线尚未在球上方退火(在热影响的区域)。实施SOS的主要障碍是视觉检查员的重新培训和质量部门的批准。
自体骨、甲基丙烯酸甲酯、多孔聚乙烯和钛网在颅骨修补术中的比较
回顾性分析我院2016年至2019年实施的颅骨修补术,对年龄、性别、诊断、手术材料、并发症进行分类,常规进行脑CT检查,创伤、肿瘤、缺血性、出血性中风、脑内血肿纳入研究,因颅颌面创伤行重建手术者排除。术后患者控制至少1年。在术前准备阶段,对每位患者进行脑CT检查,必要时进行脑磁共振成像观察。调查每位患者是否有伤口部位感染或全身感染灶,感染灶解决后至少1个月计划手术。开颅减压术中保留骨骼的患者骨瓣常规一次性置入腹部皮下组织,涉及额窦区的开颅手术用骨蜡和患者骨骼封闭额窦口,切除窦黏膜,开颅额窦。保存在腹部皮下脂肪组织内的骨瓣在开颅手术同期取出,使用前用含万古霉素的生理盐水彻底冲洗。自体骨、甲基丙烯酸甲酯和多孔聚乙烯植入物用粗vicryl缝线固定在颅骨上为标准。钛网用微型螺钉固定在颅骨上。

移动设备技术资源
o后方o前向o 360度多视图缝线o对象检测•地理范围 - 电磁学(EM),RFID,GPS,GPS和双向雷达识别车辆或人员。GPS接收器允许在潜在危险区域周围进行表面跟踪和设置定义的无周围。•地理载体:零障碍目标中的关键工具,连接,2020。• How Geofencing Is Shaping the World Around You , Toward Data Science • Collision Avoidance and Collision Warning Systems – MSHA Technical Support slide presentation, 2019 • Proximity Detection and Collision Avoidance and Collision Warning Systems - includes links to 16 manufacturer websites for collision avoidance/warning equipment for surface mining vehicles - MSHA Safety Information post • Proximity Detection – Surface and Underground Mining – NIOSH Mining Program, 2015年•验证碰撞警告/避免系统检测性能 - 尼什滑动呈现,2021•验证碰撞警告和回避系统检测系统检测性能的表面挖掘拖运卡车 - NIOSH挖掘计划,2023年,2023年•评估和实施和实施近距离挖掘设备的接近式挖掘设备 - 最新A型•NIOSH挖掘系统2. LIDAR,雷达和相机技术,车队设备,2023

Agisoft Metashape 用户手册 - 专业版,版本 1.5
概述 ................................................................................................................................ v 工作原理 ...................................................................................................................... v 关于手册 ...................................................................................................................... v 1.安装和激活 ...................................................................................................................... 1 系统要求 ...................................................................................................................... 1 GPU 加速 ...................................................................................................................... 1 安装步骤 ...................................................................................................................... 2 演示模式的限制 ............................................................................................................. 3 激活步骤 ...................................................................................................................... 3 浮动许可证 ...................................................................................................................... 5 2.拍摄场景 ...................................................................................................................... 8 设备 ............................................................................................................................. 8 相机设置 ...................................................................................................................... 8 物体/场景要求 ................................................................................................................ 8 图像预处理 ...................................................................................................................... 8 拍摄场景 ...................................................................................................................... 9 限制 ............................................................................................................................. 10 镜头校准................................................................................................ 11 计划任务 ................................................................................................................ 13 减少重叠 ................................................................................................................ 14 3....................................................................... 70 使用编码和非编码目标 ...................................................................................... 71 5.常规工作流程 ................................................................................................................ 15 首选项设置 ................................................................................................................ 15 加载照片 ................................................................................................................ 16 对齐照片 ................................................................................................................ 21 构建密集点云 ............................................................................................................. 25 构建网格 ................................................................................................................ 26 构建模型纹理 ............................................................................................................. 29 构建平铺模型 ............................................................................................................. 32 构建数字高程模型 ............................................................................................................. 33 构建正射影像 ............................................................................................................. 35 保存中间结果 ............................................................................................................. 38 导出结果 ............................................................................................................................. 39 4.引用 ............................................................................................................................. 54 相机校准 ............................................................................................................................. 54 设置坐标系 ............................................................................................................. 58 优化 ............................................................................................................................. 67 参考窗格中的错误是什么意思?测量 ................................................................................................................ 73 对 3D 模型进行测量 .............................................................................................. 73 对 DEM 进行测量 .............................................................................................. 75 植被指数计算 ...................................................................................................... 77 立体测量和矢量化 ...................................................................................................... 80 6.编辑 ................................................................................................................................ 82 使用蒙版 ...................................................................................................................... 82 编辑点云 ...................................................................................................................... 86 对密集云点进行分类 ...................................................................................................... 90 编辑模型几何 ............................................................................................................. 91 形状 ............................................................................................................................. 96 正射影像接缝线编辑 ...................................................................................................... 98 移除照明 ...................................................................................................................... 98