XiaoMi-AI文件搜索系统
World File Search System联合国环境规划署
联合国环境规划署联合国环境大会报告
A. 出席情况 4. 以下会员国派代表出席了第六届会议:阿尔及利亚、安哥拉、阿根廷、澳大利亚、奥地利、阿塞拜疆、巴林、孟加拉国、巴巴多斯、白俄罗斯、比利时、伯利兹、贝宁、不丹、博茨瓦纳、巴西、文莱达鲁萨兰国、保加利亚、布基纳法索、布隆迪、佛得角、柬埔寨、喀麦隆、加拿大、智利、中国、哥伦比亚、科摩罗、刚果、哥斯达黎加黎加、科特迪瓦、古巴、塞浦路斯、捷克、朝鲜民主主义人民共和国、刚果民主共和国、丹麦、吉布提、多米尼加、多米尼加共和国、厄瓜多尔、埃及、萨尔瓦多、厄立特里亚、爱沙尼亚、斯威士兰、埃塞俄比亚、斐济、芬兰、法国、加蓬、冈比亚、格鲁吉亚、德国、加纳、希腊、格林纳达、危地马拉、几内亚、几内亚比绍、海地、洪都拉斯、匈牙利、印度、印度尼西亚、伊朗伊斯兰共和国、伊拉克、爱尔兰、以色列、意大利、日本、约旦、哈萨克斯坦、肯尼亚、科威特、老挝人民民主共和国、拉脱维亚、利比亚、立陶宛、卢森堡、马达加斯加、马拉维、马来西亚、马尔代夫、马耳他、毛里塔尼亚、墨西哥、密克罗尼西亚联邦、摩纳哥、蒙古、摩洛哥、莫桑比克、纳米比亚、瑙鲁、尼泊尔、荷兰王国、新西兰、尼加拉瓜、尼日尔、尼日利亚、挪威、阿曼、巴基斯坦、帕劳、巴拿马、巴拉圭、秘鲁、菲律宾、波兰、葡萄牙、卡塔尔、大韩民国、罗马尼亚、俄罗斯联邦、卢旺达、圣基茨和尼维斯、萨摩亚、沙特阿拉伯、塞内加尔、塞尔维亚、塞舌尔、塞拉利昂、新加坡、斯洛伐克、斯洛文尼亚、索马里、南非、南苏丹、西班牙、斯里兰卡、苏丹、苏里南、瑞典、瑞士、阿拉伯叙利亚共和国、泰国、多哥、汤加、特立尼达和多巴哥、突尼斯、土耳其、土库曼斯坦、图瓦卢、乌干达、乌克兰、阿拉伯联合酋长国、大不列颠及北爱尔兰联合王国、坦桑尼亚联合共和国、美利坚合众国、乌拉圭、乌兹别克斯坦、瓦努阿图、委内瑞拉玻利瓦尔共和国、越南、也门、赞比亚和津巴布韦。
联合国环境规划署脱钩报告 - 我们的能源政策
即使是在两个可以说是为脱钩做出最明确努力的国家——日本和德国,乍一看,这两个国家的国内资源消耗呈现稳定甚至略有下降,但深入分析表明,许多商品都含有在国外生产、使用大量能源、水和矿物的零部件。因此,一些发达国家正通过“出口”到其他地方来应对高资源密集度的问题。报告指出,贸易——这并不奇怪——通常会增加能源使用和资源流动,因此,总体而言,贸易阻碍了脱钩,而不是促进了脱钩。
联合国环境规划署国际食品和农业组织协调专家会议报告...
用户和特定应用种类繁多,每个应用都有不同的信息需求和兴趣:不同的应用需要不同属性的信息(每个清单都适合其自身目的);不同的应用需要不同程度的细节;在不同的应用中,相同的信息可能会被以不同的方式解释(人们可能会考虑具有相同“功能响应”的几种土地用途,因此决定不需要区分这些土地用途,例如对于全球建模,天然草地/牧场可能具有与管理草地/牧场相同的功能);在不同的应用中,重点可能放在不同的方面(人们可能主要对灌溉和非灌溉土地使用感兴趣,而不管土地是用于娱乐目的、农业生产还是木材生产等)。因此,用户需求直接分类,但另一方面,用户需求会随着时间而变化。

基于多传感信息融合的移动机器人定位与环境感知技术
本文重点介绍了位置准确性低的问题和在复杂环境中移动机器人的不良环境感知性能。它基于IMU和GP的机器人姿势信息和环境知觉信息进行了关键的技术研究,以检测机器人自己的姿势信息,以及激光雷达和3D摄像头,以感知环境信息。在“姿势信息融合层”中,粒子群处理算法用于优化BP神经网络。没有偏见的卡尔曼过滤,并实现了未经意识的卡尔曼滤波器,以实现INS-GPS松散耦合导航,从而减少了INS组件IMU的偏见和噪声。此外,当GPS信号丢失发生时,训练有素的神经网络可用于输出预测信息,以进行惯性导航系统的错误校正,提供更准确的速度,并将信息作为绝对位置约束。在环境感知融合层中,补偿的IMU预一整合性调查分别与次要水平分别与视觉探光仪和激光镜探测融合。这使机器人的实时精确定位和环境图的更精细结构。最后,使用实际收集的轨迹来验证算法,以进行multi传感器信息的两级融合。实验结果表明,该算法提高了机器人的定位准确性和环境感知性能。机器人运动轨迹和原始真实轨迹之间的最大误差为1.46 m单位,而最小误差为0.04 m单位,平均误差为0.60 m。
为联合国秘书长 2024 年关于 WSIS 实施情况和联合国环境规划署 (UNEP) 后续行动的报告做出贡献
c. 用于衡量 ICT 对贵组织工作领域实现可持续发展目标的影响的指标 联合国环境署尚未采用任何具体的全球指标来衡量 ICT 如何为联合国环境署工作领域实现可持续发展目标做出贡献。但每个数据平台或报告都有可跟踪的具体影响指标。 d. 贵组织对其参与 WSIS 相关工作和其负责领域的数字发展做出了什么评估?联合国环境署尚未对其参与 WSIS 相关工作的程度进行正式的内部评估。WSIS 不是用于证明联合国环境署数字技术工作合理性的正式依据。 IV. 自峰会以来,特别是 2015 年以来,贵组织认为 WSIS 和其负责领域的数字发展的主要成就、问题和新出现的问题是什么?
大型底栖无脊椎动物环境DNA 监测技术规范
推荐采用市售商品化的DNA提取纯化试剂盒。如使用CTAB法提取DNA所需试剂如下: a) 乙二胺四乙酸二钠(Na 2 EDTA,C 10 H 14 N 2 O 8 Na 2 ·2H 2 O)。 b) 氢氧化钠(NaOH)。 c) EDTA 溶液:ρ(EDTA)=0.02 mol/L:称取5.8448 g EDTA 溶于适量超纯水中,NaOH 固体调节pH 至8.0,定容至1000 mL,121℃灭菌18 min,冷却后常温保存。 d) 三羟甲基氨基甲烷(Tris,C 4 H 11 NO 3 )。 e) 浓盐酸:ρ(HCl)=1.19 g/mL。 f) Tris-HCl 溶液:ρ(Tris-HCl)=0.1 mol/L:称取15.76 g Tris-HCl 溶于适量超纯水中,浓盐酸调pH 至8.0,定容至1000 mL,121℃灭菌18 min,冷却后常温保存。 g) 十六烷基三甲基溴化铵(CTAB)。 h) 氯化钠(NaCl)。 i) CTAB 提取液:称取4 g CTAB 和16.38 g NaCl,分别溶于适量超纯水中,加入0.02 mol/L EDTA 溶 液(5.3 c)8 mL 和0.1 mol/L Tris-HCl 溶液(5.3 f)20 mL,定容至200 mL,121℃灭菌18 min, 冷却后常温保存。 j) Tris 饱和酚(pH=8.0)。 k) 三氯甲烷(CHC l3 )。 l) 异戊醇(C 5 H1 2O )。 m) 酚氯仿:Tris 饱和酚、氯仿和异戊醇按25:24:1 体积比配制。 n) 乙酸铵(CH 3 COONH 4 )。 o) 乙酸铵溶液,ρ(CH3COONH4)=7.5 mol/L:称取5.78 g 乙酸铵溶于10 mL 超纯水中。 p) 乙酸钠(CH 3 COONa·3H 2 O)。 q) 乙酸钠溶液,ρ(CH 3 COONa)=3 mol/L:称取102.06 g 乙酸钠溶于适量超纯水中,冰醋酸调节pH 至5.2,定容至250 mL,121 ℃灭菌18 min; r) 无水乙醇(C 2 H 6 O)。 s) 冰乙酸(C 2 H 4 O 2 )。 t) 蛋白酶K:400 U/mL。 u) 超纯水:经121 ℃,0.1 MPa 灭菌30 min,无细菌无DNA 酶。
规划署费用
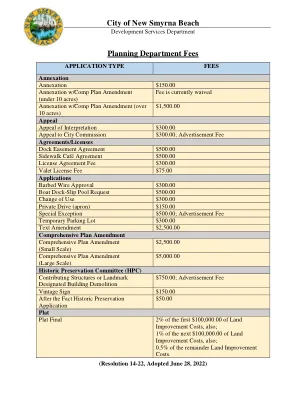
地块初步(25 个或更少单位)$2,000.00 地块初步(超过 25 个单位)$4,000.00 地块小分区$300.00 地块组合信$50.00 场地规划变更单(第一次之后)第二次和每次后续变更单$500.00 场地规划重新提交(第一次之后)第二次和每次后续重新提交$750.00 规划单元开发协议 PUD 协议(少于 10 英亩)$7,500.00 PUD 协议(10 英亩或以上)$9,000.00 PUD 协议修正案$5,000.00 PUD 协议小修正案$100.00 区域影响开发(DRI)$25,000.00 比例公平份额协议$5,000.00场地规划 场地规划(主要 I 类)$300.00 场地规划(II 类)(5,000 平方英尺以下或 8 个单位以下)
空间微重力环境下脑内神经化学物质响应的研究进展
[1] 陈善广 , 陈金盾 , 姜国华 , 等 .我国载人航天成就与空间 站建设 .航天医学与医学工程 , 2012, 25: 391-6 [2] 唐琳 .中国空间站完成在轨建造并取得一系列重大进 展 .科学新闻 , 2023, 25: 11 [3] 肖毅 , 陈晓萍 , 许潇丹 , 等 .空间脑科学研究的回顾与展 望 .中国科学 : 生命科学 , 2024, 54: 325-37 [4] 王跃 , 陈善广 , 吴斌 , 等 .长期空间飞行任务中航天员出 现的心理问题 .心理技术与应用 , 2013, 1: 40-5 [5] 陈善广 , 王春慧 , 陈晓萍 , 等 .长期空间飞行中人的作业 能力变化特性研究 .航天医学与医学工程 , 2015, 28: 1-10 [6] 凌树宽 , 李玉恒 , 钟国徽 , 等 .机体对重力的感应及机制 .生命科学 , 2015, 27: 316-21 [7] 范媛媛 , 厉建伟 , 邢文娟 , 等 .航天脑科学研究进展 .生 命科学 , 2022, 34: 719-31 [8] 梁小弟 , 刘志臻 , 陈现云 , 等 .生命中不能承受之轻 —— 微重力条件下生物昼夜节律的变化研究 .生命科学 , 2015, 27: 1433-40 [9] 邓子宣 , Papukashvili D, Rcheulishvili N, 等 .失重 / 模拟 失重对中枢神经系统影响的研究进展 .航天医学与医 学工程 , 2019, 32: 89-94 [10] Tays GD, Hupfeld KE, McGregor HR, et al.The effects of long duration spaceflight on sensorimotor control and cognition.Front Neural Circuits, 2021, 15: 723504-18 [11] Mhatre SD, Iyer J, Puukila S, et al.Neuro-consequences of the spaceflight environment.Neurosci Biobehav Rev, 2022, 132: 908-35 [12] 陈善广 , 邓一兵 , 李莹辉 .航天医学工程学主要研究进 展与未来展望 .航天医学与医学工程 , 2018, 31: 79-89 [13] Moyer EL, Dumars PM, Sun GS, et al.Evaluation of rodent spaceflight in the NASA animal enclosure module for an extended operational period (up to 35 days).NPJ Microgravity, 2016, 2: 16002-9 [14] Mains R, Reynolds S, Associates M, et al.A researcher's guide to: rodent research [M].Rat maintenance in the research animal holding facility during the flight of space lab 3.Washington D.C.: National Aeronautics and Space Administration, 2015 [15] Fast T, Grindeland R, Kraft L, et al.Physiologist, 1985, 28: S187-8 [16] Ronca AE, Moyer EL, Talyansky Y, et al.Behavior of mice aboard the international space station.Sci Rep, 2019, 9: 4717 [17] Morey-Holton ER, Hill EL, Souza KA.Animals and spaceflight: from survival to understanding.J Musculoskelet Neuronal Interact, 2007, 7: 17-25 [18] 陈天 , 胡秦 , 石哲 , 等 .美国太空动物实验研究发展历程 .中国实验动物学报 , 2022, 30: 582-8 [19] 董李晋川 , 黄红 , 刘斌 , 等 .苏俄太空动物实验研究发展 历程 .中国实验动物学报 , 2022, 30: 557-67 [20] Beheshti A, Shirazi-Fard Y, Choi S, et al.Exploring the effects of spaceflight on mouse physiology using the open access NASA GeneLab platform.J Vis Exp, 2019, 143: e58447- 58 [21] 姜宁 , 刘斌 , 张亦文 , 等 .欧日太空动物实验研究概况 .中国实验动物学报 , 2022, 30: 568-73 [22] Mao XW, Byrum S, Nishiyama NC, et al.Impact of
