XiaoMi-AI文件搜索系统
World File Search System背壳
壳板的开发 - 启发论文
4.1 测地线追踪离散化 ................................................................................................................................................ 66 4.2 通过几何程序进行测地线追踪 ................................................................................................................................ 67 4.3 使用优化程序进行测地线追踪 ............................................................................................................................. 72 4.4 地图要求 ...................................................................................................................................................... 77 4.5 地图概念 ............................................................................................................................................................. 78 4.6 地图详述 ............................................................................................................................................................. 80 4.7 唯一性问题 ............................................................................................................................................................. 86 4.8 追踪测地线的精度要求 ............................................................................................................................. 87 4.9 初步验证的图版集 ............................................................................................................................................. 88 4.10 比较验证 .............................................................................................................................................

Purolite™浅壳Shell™SSTPPC60H
本文中包含的陈述,技术信息和建议截至本文之日起准确。由于产品的使用条件和使用条件和方法是我们无法控制的,因此,Purolite明确违反了对任何对产品或对此类信息的使用或依赖造成的结果或产生的任何结果的责任;对于任何特定目的,适合性的保证或任何其他明示或暗示的保证,都没有关于所描述的货物或本文提供的信息的任何其他保证的保证。本文提供的信息仅与指定的特定产品有关,并且当该产品与其他材料或任何过程中使用时可能不适用。此处包含的任何内容构成根据任何专利的执业许可,也不应解释为侵犯任何专利的诱因,建议用户采取适当的步骤以确保对产品的任何建议使用不会导致专利侵权。

基于机器学习的优化设计,可弯曲壳1
&这些作者为这项工作做出了同样的贡献,应被视为联合第一作者 *通讯作者。电子邮件地址:zwhdwy@hnu.edu.cn(W。H Zhang); thuangsq@jnu.edu.cn(S.Q。 黄)。电子邮件地址:zwhdwy@hnu.edu.cn(W。H Zhang); thuangsq@jnu.edu.cn(S.Q。黄)。
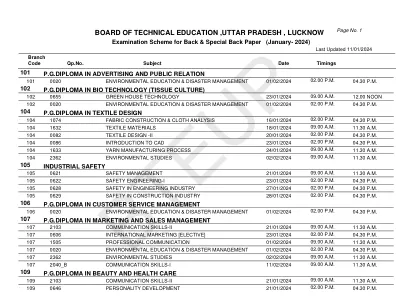
背面和特别背纸的考试计划(1月
101 P.G.广告和公共关系环境教育与灾难管理0020 101 01/02/2024 02.00 p.m.下午04.30 102 p.g. -diploma Bio Technology(组织培养)温室技术0655 102 102 23/01/2024 09.00 A.M. 12.00中午环境教育与灾难管理0020 102 01/02/2024 02.00 p.m.下午04.30 104 p.g. -diploma在纺织品设计面料建筑与布分析1074 104 104 16/01/2024 02.00 p.m.下午04.30 纺织材料1632 104 18/01/2024上午09.00上午11.30 人格发展0646 109 21/01/2024 02.00 p.m.下午04.30101 P.G.广告和公共关系环境教育与灾难管理0020 101 01/02/2024 02.00 p.m.下午04.30 102 p.g. -diploma Bio Technology(组织培养)温室技术0655 102 102 23/01/2024 09.00 A.M. 12.00中午环境教育与灾难管理0020 102 01/02/2024 02.00 p.m.下午04.30 104 p.g. -diploma在纺织品设计面料建筑与布分析1074 104 104 16/01/2024 02.00 p.m.下午04.30纺织材料1632 104 18/01/2024上午09.00上午11.30人格发展0646 109 21/01/2024 02.00 p.m.下午04.30纺织设计-II 0082 104 20/01/2024 02.00 p.m.下午04.30 CAD 0086简介104 23/01/2024 02.00 p.m.下午04.30纱线制造过程1633 104 24/01/2024上午09.00上午11.30环境研究2362 104 02/02/2024 09.00上午上午11.30 105工业安全管理管理0621 105 21/01/2024 09.00上午上午11.30安全工程-I 0622 105 23/01/2024 02.00 p.m.下午04.30工程行业的安全0628 105 27/01/2024 02.00 p.mm下午04.30建筑行业的安全0629 105 28/01/2024 02.00 p.m.下午04.30 106 P.G. Diploma客户服务管理环境教育与灾难管理0020 106 01/02/2024 02.00 p.m.下午04.30 107 P.G.营销和销售管理沟通技巧2103 107 21/01/2024上午09.00上午11.30国际营销[选修] 0606 107 23/01/2024 02.00 p.m.下午04.30专业通信1505 107 01/02/2024 09.00上午上午11.30环境教育与灾难管理0020 107 01/02/2024 02.00 p.m.下午04.30环境研究2362 107 02/02/2024上午09.00上午11.30沟通技巧-I 2040_B 107 11/02/2024 09.00上午上午11.30 109 p.g.-Diploma在美容与卫生保健沟通技巧-II 2103 109 21/01/2024上午09.00上午11.30

模拟电线和……的壳结构的构建形状
在 WAAM 等 DED 工艺中,计算机辅助制造 (CAM) 系统用于使用计算机辅助设计 (CAD) 数据生成沉积路径。用于加工工艺的通用 CAM 系统输出加工后的三维 (3D) 形状。用于 AM 工艺的商用 CAM 系统也可以在构建过程之后绘制 3D 形状;但是,用户必须手动输入焊珠几何形状,并且估计精度不够高,因为焊珠几何形状取决于各种因素,例如工艺参数、目标形状和位置。在给定上下文中,目标形状是指目标形状是否悬垂的情况(Abe 和 Sasahara,2015 年;Sasahara 等,2009 年),位置对应于熔池在


用于动态分析的等几何混合壳
摘要 飞机水平稳定器容易因气流与机翼分离以及随后尾流对稳定器结构的冲击而发生疲劳损坏,这被称为抖振事件。在本研究中,先前开发的等几何混合壳方法在动态分析环境中重新表述,以使用不同的俯仰角模拟飞机起飞。提出的 Kirchhoff-Love (KL) 和连续壳混合允许使用连续壳对飞机水平稳定器的关键结构部件进行建模,以获得高保真度的 3D 应力,而使用计算效率高的 KL 薄壳对不太重要的部件进行建模。施加的气动载荷是由混合浸入几何和边界拟合的计算流体动力学 (CFD) 分析生成的,以准确记录稳定器外表面上的动态激励。具体来说,为了节省计算量,除了机翼和稳定器之外的整个飞机都浸入基于浸入几何分析 (IMGA) 概念的非边界拟合流体域中,而围绕飞机机翼和稳定器的网格是边界拟合的,以准确计算稳定器上的气动载荷。然后将获得的载荷时间变化应用于水平稳定器的动态混合壳分析,并评估高保真应力响应以进行后续疲劳评估。然后进行简单的频域疲劳分析,以评估稳定器的抖振引起的疲劳损伤。代表性水平稳定器的稳态和动态非线性混合壳分析结果证明了所提方法的数值精度和计算效率。
用于动态分析的等几何混合壳
摘要 飞机水平稳定器容易因气流与机翼分离以及随后其尾流对稳定器结构的冲击而发生疲劳损坏,这被称为抖振事件。在本文中,之前开发的等几何混合壳方法在动态分析设置中被重新制定,以模拟使用不同俯仰角的飞机起飞。所提出的 Kirchhoff-Love (KL) 和连续壳混合允许使用连续壳对飞机水平稳定器的关键结构部件进行建模,以获得高精度 3D 应力,而使用计算效率高的 KL 薄壳对不太重要的部件进行建模。施加的气动载荷由混合浸入几何和边界拟合的计算流体动力学 (CFD) 分析生成,以准确记录稳定器外表面的动态激励。具体来说,为了节省计算量,除了机翼和稳定器之外的整个飞机都浸入基于浸入几何分析 (IMGA) 概念的非边界拟合流体域中,而围绕飞机机翼和稳定器的网格则采用边界拟合,以准确计算稳定器上的气动载荷。然后将获得的载荷时间变化应用于水平稳定器的动态混合壳分析,并评估高保真应力响应以进行后续疲劳评估。然后进行简单的频域疲劳分析,以评估稳定器的抖振引起的疲劳损伤。代表性水平稳定器的稳态和动态非线性混合壳分析结果证明了所提方法的数值精度和计算效率。
壳能量过渡策略2024(PDF)
我们认为,我们的总绝对排放量在2018年达到1.73 Gigatonnes的二氧化碳等效含量(GTCO 2 E)。[a]操作控制边界。范围1和2目标是净基础。[b]参考年度。[C] Shell的NCI是Shell出售的能量产品的平均强度,由销售量加权。NCI中包含的估计总温室气体(GHG)排放量对应于与Shell在股票边界上出售的能量产品相关的良好的轮胎排放,这是碳信用净值的净值。这包括与其他由Shell出售的其他能源产品相关的富裕排放。排放量被排除在外。[D] 2021目标2-3%,2022目标3-4%,2023目标6-8%,全部实现。承认能量转变变化速度的不确定性,我们还选择退休2035年目标,即净碳强度降低了45%。[e]我们的目标是将甲烷排放强度保持在0.2%以下,并到2030年达到接近零的甲烷排放。[f]来自所有石油和天然气资产的甲烷排放强度,其销售其气体的运营商(包括LNG和GTL资产)定义为正常立方米中甲烷排放的总量(NM3),每种可在NM3中出售的气体总量。[g]来自所有油气资产的甲烷排放强度在重新注射气体的地方定义为每吨总质量的石油和冷凝水的总质量,可在吨中出售。[H]我们的目标是在2025年消除上游操作中的常规气体,但要完成SPDC的销售。[i]我们设定了一个新的野心,将与我们的石油产品使用相关的绝对排放量减少到2030年,而2021年(范围3类别11)。使用我们的石油产品(范围3,第11类)的客户排放量为2023年的5.17亿吨二氧化碳等效含量(CO 2 E),而2021年的客户排放量为5.69亿吨Co 2 E。