XiaoMi-AI文件搜索系统
World File Search System背车
电池电动汽车和燃料电池车的比较
摘要:在当前对几个欧洲城市采用的化石燃料汽车(柴油和汽油)禁令的情况下,提出的问题是基础设施开发用于分配替代氢的基础设施,即燃料电池电动汽车(用于电动汽车)和电力汽车(电池电动汽车)。首先,我们比较了用户的两种替代推进模式的主要优点/约束。氢气的主要优点是自主性和快速充电。电池动力车辆的主要优点是电网的价格较低和广泛可用性。然后,我们回顾有关新氢分配网络部署的现有研究,并比较氢和电力分销网络的部署成本。最后,我们以一些个人结论得出结论,内容涉及开发模式和思想的未来研究的好处。
基于椭圆车的储能样机设计
1 电气技术专家,弗朗西斯科何塞卡尔达斯地区大学。电子邮件:jdgunturiza@correo.udistrital.edu.co 2 弗朗西斯科·何塞·德卡尔达斯地区大学工程师和教授。电子邮件:fmartinezs@udistrital.edu.co
电动汽车车舱能源管理考量
• 续航里程满意度(驾驶员的续航里程焦虑) • 公共和私人充电基础设施 • 与内燃机汽车相比的车辆购买价格 • 维护成本 • 开发成本 • 减少温室气体排放 • 电动汽车运行时是否存在合理的热舒适度

声音和蓝牙控制的机器人车
1。引言在机器人技术领域,尖端技术的融合为重新定义自动系统功能的创新解决方案铺平了道路。该项目标志着这一轨迹的重大大步,引入了以双重控制范式语音和蓝牙为特色的智能机器人车辆。机器人车辆将接受用户语音命令并执行给定的用户任务,而没有人类的存在,可以通过用户语音输入来控制机器人。机器人可以通过用户语音输入操作。它需要一个Android应用来通过蓝牙HC-05模块进行通信。然后,机器人车辆可以借助超声传感器模块感知对象。对于硬件,自定义的Arduino将控制用于运行机器人车辆的电机。超声传感器与Arduino在突然障碍物检测中自动制动车辆的帮助。避免机器人目前在人类无法进入的危险区域中使用。它可以很容易地识别声音。在此设计中,使用微控制器的Android应用程序用于所需的任务。用蓝牙技术促进了应用程序和机器人之间的连接。这项工作的核心目标是创建一种机器人车辆,能够通过与用户无缝互动来执行用户定义的任务。由专用的Android应用程序促进的语音控制集成使用户可以直观地与机器人工具进行通信。同时由HC-05模块启用的蓝牙连接提供了额外的控制层,增强用户可访问性并扩展了车辆的操作范围。此中央控制单元可以解释语音命令和蓝牙输入,从而授权机器人车辆自治,以有效地浏览其环境。补充这些控制功能是超声波传感器模块,可确保实时障碍物检测并促进自动制动以提高安全性。在机器人技术中,为智能机器人车提供了语音和蓝牙控制的无缝集成。其双控制能力,再加上避免障碍物,为自主系统设定了新标准。因此,无缝特征诸如障碍物控制和声音以及机器人的蓝牙控制能力。
车轮上的电池 - 运输与环境
在2019 - 2024年欧盟立法周期中采用了刺激清洁卡车的关键法规。新的Eurovignette指令引入了CO 2的收费,以激励从污染的柴油卡车到零发射车辆(ZEVS)的转变,而替代性燃料基础设施监管(AFIR)授权欧盟成员国向HDVS推出公共充电和加油网络。HDV的CO 2排放标准的修订要求车辆制造商可以增加汽车销售,并通过排放交易系统2(ETS2)定价道路运输排放,从而创造了减少化石燃料使用的市场激励措施。但是,在委员会提案提出的一年半后,欧盟仍然必须就重量和维度(W&D)指令的审查达成共识(请参见下图)。
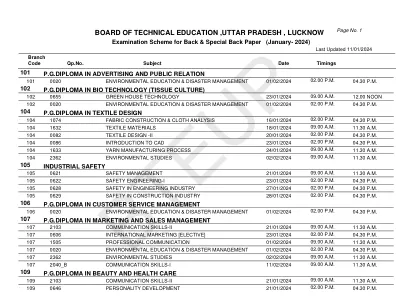
背面和特别背纸的考试计划(1月
101 P.G.广告和公共关系环境教育与灾难管理0020 101 01/02/2024 02.00 p.m.下午04.30 102 p.g. -diploma Bio Technology(组织培养)温室技术0655 102 102 23/01/2024 09.00 A.M. 12.00中午环境教育与灾难管理0020 102 01/02/2024 02.00 p.m.下午04.30 104 p.g. -diploma在纺织品设计面料建筑与布分析1074 104 104 16/01/2024 02.00 p.m.下午04.30 纺织材料1632 104 18/01/2024上午09.00上午11.30 人格发展0646 109 21/01/2024 02.00 p.m.下午04.30101 P.G.广告和公共关系环境教育与灾难管理0020 101 01/02/2024 02.00 p.m.下午04.30 102 p.g. -diploma Bio Technology(组织培养)温室技术0655 102 102 23/01/2024 09.00 A.M. 12.00中午环境教育与灾难管理0020 102 01/02/2024 02.00 p.m.下午04.30 104 p.g. -diploma在纺织品设计面料建筑与布分析1074 104 104 16/01/2024 02.00 p.m.下午04.30纺织材料1632 104 18/01/2024上午09.00上午11.30人格发展0646 109 21/01/2024 02.00 p.m.下午04.30纺织设计-II 0082 104 20/01/2024 02.00 p.m.下午04.30 CAD 0086简介104 23/01/2024 02.00 p.m.下午04.30纱线制造过程1633 104 24/01/2024上午09.00上午11.30环境研究2362 104 02/02/2024 09.00上午上午11.30 105工业安全管理管理0621 105 21/01/2024 09.00上午上午11.30安全工程-I 0622 105 23/01/2024 02.00 p.m.下午04.30工程行业的安全0628 105 27/01/2024 02.00 p.mm下午04.30建筑行业的安全0629 105 28/01/2024 02.00 p.m.下午04.30 106 P.G. Diploma客户服务管理环境教育与灾难管理0020 106 01/02/2024 02.00 p.m.下午04.30 107 P.G.营销和销售管理沟通技巧2103 107 21/01/2024上午09.00上午11.30国际营销[选修] 0606 107 23/01/2024 02.00 p.m.下午04.30专业通信1505 107 01/02/2024 09.00上午上午11.30环境教育与灾难管理0020 107 01/02/2024 02.00 p.m.下午04.30环境研究2362 107 02/02/2024上午09.00上午11.30沟通技巧-I 2040_B 107 11/02/2024 09.00上午上午11.30 109 p.g.-Diploma在美容与卫生保健沟通技巧-II 2103 109 21/01/2024上午09.00上午11.30
考虑车对车模式的电动汽车充电管理系统,用于优化利用光伏能源
分布式可再生能源 (RES) 的普及率不断提高,加上新型电动汽车 (EV) 型号注册数量不断增加,在零碳能源社区的发展中发挥着重要作用。然而,间歇性可再生能源发电厂的份额越来越大,再加上高且不受控制的电动汽车充电需求总量,要求能源区必须向新的规划和管理模式发展。因此,在这种背景下,本文提出了新颖的智能充电 (SC) 技术,旨在尽可能多地在当地整合 RES 发电和 EV 充电需求,协同作用于电力流并避免对电力系统产生不利影响。为了实现这一点,本文介绍了一种集中式充电管理系统 (CMS),该系统能够单独调节每个插电式电动汽车的充电功率。CMS 旨在最大限度地提高本地 RES 的充电自耗,从而拉平外部电网所需的峰值功率。此外,即使在低 RES 电力可用性条件下,CMS 也能保证所有车辆在出发时的整体充电状态 (SOC) 良好,且无需从电网获取额外能量。本文提出了两种根据 EV 功率流方向而不同的方法。第一种 SC 仅涉及单向功率流,而第二种方法还考虑车辆之间的双向功率流,以车对车 (V2V) 模式运行。最后,根据实际案例研究进行的模拟验证了 SC 对参考场景的影响,该参考场景包括具有光伏 (PV) 电站、非模块化电气负载和 EV 充电站 (CS) 的工业区。本文收集了结果,并比较和详细描述了通过操作不同的 SC 方法实现的性能改进。

文章背光和新型自动化 ETDRS 的比较...
在临床实践中使用视力测量方法,部分原因是该方法易于使用且可用。斯内伦原始视力表顶部有一个大字母,随着每一行的增加,字母变得越来越多,并且逐渐变小。5 字母的可读性并不一致;字母和行距也不一致。4,6,7 此外,自最初构思以来,视力表的大小、顺序、图表布局和设计都发生了许多变化;因此,没有广泛接受的“标准”斯内伦视力表。5 最常见的是,视力测量是在高对比度条件下确定的,如前所述。随着时间的推移,图表所需的对比度水平可能会受到污渍和褪色的影响,这可能会改变反射率。房间位置和房间照明也可能带来变化。3
背栅石墨烯晶体管的接触电阻和迁移率
摘要 金属-石墨烯接触电阻是限制石墨烯在电子设备和传感器中技术开发的主要因素之一。高接触电阻会损害器件性能并破坏石墨烯固有的优良特性。在本文中,我们制造了具有不同几何形状的背栅石墨烯场效应晶体管,以研究接触和沟道电阻以及载流子迁移率随栅极电压和温度的变化。我们应用传输长度法和 y 函数法,表明这两种方法可以相互补充以评估接触电阻并防止在估计载流子迁移率对栅极电压的依赖性时出现伪影。我们发现栅极电压以类似的方式调节接触和沟道电阻,但不会改变载流子迁移率。我们还表明,升高温度会降低载流子迁移率,对接触电阻的影响可以忽略不计,并且可以根据施加的栅极电压诱导石墨烯薄层电阻从半导体行为转变为金属行为。最后,我们表明,消除接触电阻对晶体管沟道电流的不利影响几乎可以使载流子场效应迁移率翻倍,并且通过 Ni 接触的锯齿形成形可以实现低至 700 Ω · μ m 的竞争性接触电阻。