XiaoMi-AI文件搜索系统
World File Search System蓝牙

Albion光滑与时尚数字蓝牙锁
使用功能强大的TTLOCK应用程序,锁定和用户设置很容易配置和管理。可以通过PIN代码,RFID凭据,通过BLE管理的Ekeys和Mechanical Key Override提供给家人和访问者的访问。通过添加McGrath锁WiFi网关,您可以使用TTLOCK应用程序将Albion远程解锁。
DX-CP27 小型低功耗蓝牙信标
表格索引 表 1:基本参数表......................................................................................................................- 5 - 表 2:KEY 功能定义表...............................................................................................................- 6 - 表 3:工作及存储温度表..............................................................................................................- 7 - 表 4:功耗表.............................................................................................................................- 7 - 表 5:射频特性.............................................................................................................................- 7 - 表 6:距离测量.............................................................................................................................- 8 - 表 7:模块引脚 ESD 耐压.............................................................................................................- 8 -
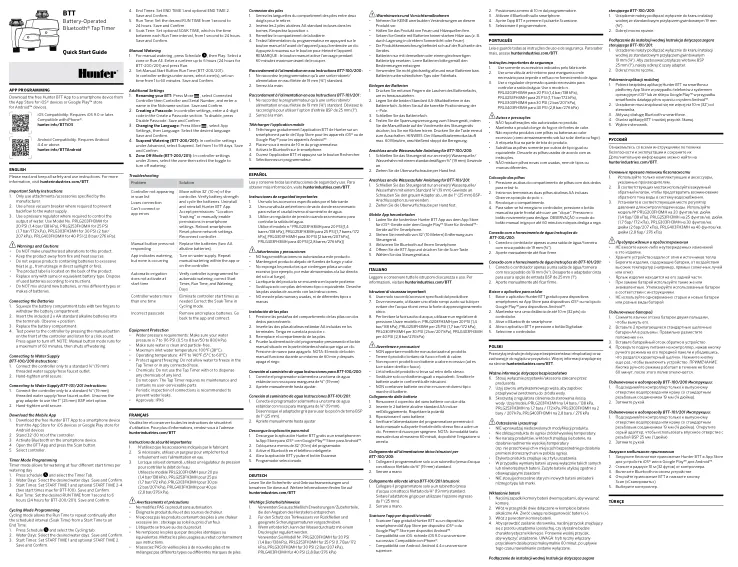
电池供电的蓝牙® 点击定时器快速入门指南
警告和注意事项 • 请勿对产品进行任何未经授权的修改。 • 使产品远离火源和热源。 • 请勿将电池供电的产品暴露在过热的环境中(例如阳光直射或火中)。 • 产品标签位于产品背面。 • 只能使用相同或相当的电池进行更换。根据说明处理废旧电池。 • 请勿混用新旧电池或不同类型或品牌的电池。连接电池 1. 用两根手指取下电池仓盖。 2. 将 2 节标准 AA 碱性电池插入电池仓。尊重极性。 3. 更换电池仓。 4. 按下编程器正面的手动按钮直到听到咔嗒声,检查编程器的电源。再按一次即可关闭。注意:手动按钮模式最多持续 60 分钟,之后停止浇水。

太阳能自动多功能农业机器人使用蓝牙/Android App G.Kumara Swamy,B. eee的B. gopal Dept,Priyadarshini
太阳能自动多功能农业机器人使用蓝牙/Android App G.Kumara Swamy,B. eee的B. gopal Dept,Priyadarshini女性科学技术学院Khammam。摘要 - 本文介绍了单个机器人完成的多个农业任务。要发展农业任务的效率,我们必须找到新方法。该项目介绍了一种以非常有效的方式耕种土地的新方法。这种农业机器人系统的独特性是它具有多任务的能力,可以钻,拾取和地点,播种,抽水和肥料,天气监测以在农业,造林和园艺平台上工作。项目的目的是设计,开发和制造机器人,这些机器人可以挖土壤,将种子,滚筒关闭泥浆和喷雾器以喷水,整个机器人系统在电池和太阳能的帮助下工作。世界上有40%以上的人口选择农业作为主要职业,近年来,农业中自动驾驶汽车的发展引起了人们的兴趣。引言农业的历史可以追溯到数千年,其发展是由截然不同的气候,文化和技术驱动和定义的。因此,应提出农业系统以减少农民的努力。该模型开发的模型会自动播种种子,喷洒农药并切草。第二部分介绍了相关的作品。在第三节中介绍了多功能农业机器人的拟议设计。wifi用作接收器。原型代表了改善农业播种,草切割和基于on植物的农药喷涂的农业过程的系统。本文的组织如下。第四节讨论了算法实现。在第五部分的原型结果中进行了讨论。在第六节中的工作得出了结论。相关工作,由于没有有效的设备来帮助农民。需要实施新技术。提出了想法后,设计选项将最终确定。在[1]中,Saurabh Umarkar和Anil Karwankar讨论了种子播种的过程是农业菲尔德的关键组成部分。FormanyCropvarieties,已为广泛的种子尺寸开发了高度固定的pnemanumaticplanting,从而导致沿theTravel Pate的种子间隔中的种子均匀种子分布。该系统的主要缺点是机器人仅向一个方向移动。每当有障碍物电源自动关闭时。在[2]中,M.D.I.Sujon,R.Nasirandjayasreebaidya,农业研究员determenterderminedtheefectsofsofsofvariouseedesee ding技术和机器,以及在建立种子出现植物和最终晶粒中的油籽强奸率的不同速率。机器人将对超声检测进行农业类比,以改变其位置。该系统的主要缺点是,它不是土壤的WorkwellonAlltypes。在[3]中,H.Potar Eaton,Jkatupitiya和Sdpathirana结论得出的结论是,随着熟练的播种工人几乎在减少,Bullock绘制的种植成为必需品。可以减少劳动问题。种植植物和植物种群是最大化农作物产量的急性因素。在此微控制器8051中用于输入和输出设备之间的通信。该模型的主要缺点是,它仅由一种机制组成。在[4]中,S.Kareemulla,Kshaik,Eprajwal,Bmahesh,Vreddy,该系统使农民在种子播种的基本操作中受益。该机器的操作模式很简单。有可能有效提高总产量百分比。较少。也浪费种子较少。模型的缺点是,它仅由一个机制组成。

带有蓝牙和NRF24L01+ Communication的Arduino控制的多功能机器人
本文概述了高级机器人系统的设计和开发,该系统将硬件实现与理论模拟集成在一起,以满足各种环境中多功能和用户友好的机器人解决方案的需求。解决现有机器人系统中适应性有限的问题时,我们提出了一个无线,语音和手势控制的机器人车,其集成的机器人臂能够执行复杂的任务,例如线条跟随,避免障碍物,对象操纵,对象操纵和自主导航,并在单公里范围内执行自主导航。为了提高运营效率和用户参与,本文设计了一个多功能机器人平台,将用户友好的控制接口与廉价,最先进的传感器技术集成在一起。为了实现这一目标,我们集成了各种传感器,包括用于精确距离测量的超声传感器,用于对象检测和线条跟随的红外传感器,用于控制齿轮电动机的L298电动机驱动器,用于控制机器人臂的伺服电机,用于链球控制的螺纹传感器的伺服电动机,用于链球控制的弹性传感器以及MPU6050 ACCELEREMER的距离识别途径。该系统还使用定制的蓝牙应用程序进行远程控制,NRF24L01+用于远程无线控制,以及Arduino Mega和Nano进行处理和控制功能。结果证明了该机器人在动态条件下的功能很好,并且可以在医院中使用,以帮助医疗保健专业人员,餐馆提供食品交付以及在工业环境中进行对象操纵。在现实世界中,系统的设计证明了强大的功能,从而可显着提高可访问性和操作效率。这项研究与可持续发展目标(SDGS)3(健康与福祉),9(行业,创新和基础设施)和17(目标的合作伙伴关系)保持一致。机器人部门在医疗保健环境中的潜在应用可持续发展可持续发展目标3,其对工业生产力提高SDG 9的贡献以及与科技公司的合作,以扩展和提高机器人的能力促进SDG17。

Logitech M196蓝牙鼠标
方便的便携式鼠标用于笔记本电脑和平板电脑:Logitech M196蓝牙无线鼠标以可靠的配对蓝牙连接(无需舒适的端口或端口)舒适,即准备好设计:这种蓝牙旅行鼠标是轻便的,适合任何袋子;它的轮廓,敏捷的形状适合左手和右手在各种表面上工作:具有精确的线条滚动和光学跟踪; M196无线蓝牙鼠标可在几乎所有用再生塑料的表面上提供平稳而准确的光标控制:M196中的塑料零件包含经过认证的后消费者再生式塑料(Graphite的67%,off-White和off-White和Rose(2)12个月的电池寿命为12个月的电池寿命(1个月份)的电池寿命(1个月份),并使用电池寿命(1)使用(1),并更换电池效果(1),并更换电池(1),并使用自动效果(1)使用自动(1),1个月份(1)均可使用自动效果(1)。 1 AA电池几乎包含一个小型无线鼠标:这种多功能且具有成本效益的蓝牙鼠标非常适合移动生产力和学习;与大多数操作系统和设备一起使用

Bluedos:一种新颖的方法来执行和分析DOS攻击对蓝牙设备的攻击
摘要:蓝牙设备的使用正在遍布整个数字景观。随着这些功能的多样性和数量的增加,对蓝牙技术中安全性的关注也会增加。我们的研究主要集中于对蓝牙设备的DOS攻击。我们发现现有工具依赖于Bluez协议堆栈提供的Linux蓝牙驱动程序和实用程序。由于这种依赖,这些工具需要通过蓝牙通信的完整命令,因为它们仅限于基础协议堆栈提供的功能。为了解决此限制,我们使用Bluez Linux协议堆栈(我们的测试床上称为“ Bluedos”)开发了蓝牙驱动程序二进制二进制文件。由于使用C开发了Bluedos,类似于其他Linux驱动程序,因此在操作系统级别的数据包创建和处理蓝牙连接方面提供了更大的灵活性。使用“蓝色DOS”,我们使用信誉良好的品牌的耳机进行了广泛的DOS攻击,以说明潜在的攻击向量。我们还分析了DOS攻击对不同连接参数(例如响应时间)的影响,并引入了新型的L2连接和针对蓝牙设备的L2Connect洪水攻击。我们使用蓝牙嗅探器验证了我们的发现,并根据我们的分析得出结论。

太阳能,蓝牙控制的种子计量机构的设计和开发
抽象是一种太阳能驱动的,蓝牙控制的种子计量机制,以使机器可持续且易于使用。使用蓝牙设备(如智能手机)降低了机器的成本,并具有很高的产量。它取代了燃料动力的种子计量机制,该机制有很多环境问题和人工成本。在开发的机器中,该机器由存储在电池中的太阳能提供动力。同时,机器的电动机正在使用此电源旋转,并且指示由智能手机等蓝牙设备控制。对于机器的行驶,我们使用了两个直流电动机和方向控制。前轮连接到轴承,而后轮运动高或旋转高的地方,前轮旋转该侧。对于计量机构,我们使用了金属齿轮伺服电动机360,该伺服电动机360使用蓝牙模块由Arduino Uno控制。鹰嘴豆使用该机器进行计量,并给出83%的现场效率,0.48和0.40 HAC/HR理论和实际场容量。关键字:太阳能,蓝牙模块,现场效率arduino uno

英飞凌 AIROC™ Wi-Fi 和蓝牙® IoT 合作伙伴...
– 为英飞凌 MCU 和无线设备提供沉浸式开发体验。您可以使用我们的 ModusToolbox™ Eclipse IDE,或第三方 IDE,例如 Visual Studio Code、IAR Embedded Workbench 和 Keil µVision。

声音和蓝牙控制的机器人车
1。引言在机器人技术领域,尖端技术的融合为重新定义自动系统功能的创新解决方案铺平了道路。该项目标志着这一轨迹的重大大步,引入了以双重控制范式语音和蓝牙为特色的智能机器人车辆。机器人车辆将接受用户语音命令并执行给定的用户任务,而没有人类的存在,可以通过用户语音输入来控制机器人。机器人可以通过用户语音输入操作。它需要一个Android应用来通过蓝牙HC-05模块进行通信。然后,机器人车辆可以借助超声传感器模块感知对象。对于硬件,自定义的Arduino将控制用于运行机器人车辆的电机。超声传感器与Arduino在突然障碍物检测中自动制动车辆的帮助。避免机器人目前在人类无法进入的危险区域中使用。它可以很容易地识别声音。在此设计中,使用微控制器的Android应用程序用于所需的任务。用蓝牙技术促进了应用程序和机器人之间的连接。这项工作的核心目标是创建一种机器人车辆,能够通过与用户无缝互动来执行用户定义的任务。由专用的Android应用程序促进的语音控制集成使用户可以直观地与机器人工具进行通信。同时由HC-05模块启用的蓝牙连接提供了额外的控制层,增强用户可访问性并扩展了车辆的操作范围。此中央控制单元可以解释语音命令和蓝牙输入,从而授权机器人车辆自治,以有效地浏览其环境。补充这些控制功能是超声波传感器模块,可确保实时障碍物检测并促进自动制动以提高安全性。在机器人技术中,为智能机器人车提供了语音和蓝牙控制的无缝集成。其双控制能力,再加上避免障碍物,为自主系统设定了新标准。因此,无缝特征诸如障碍物控制和声音以及机器人的蓝牙控制能力。