XiaoMi-AI文件搜索系统
World File Search System蛇形
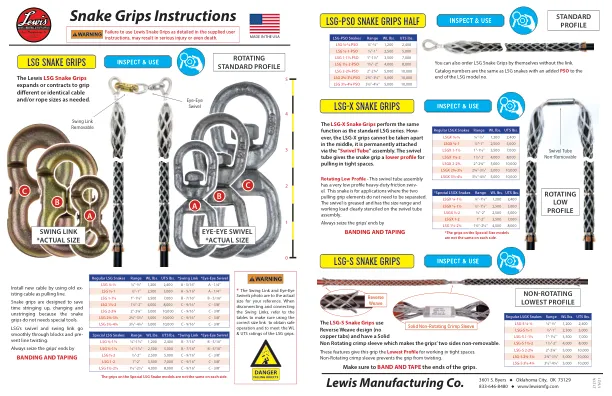
蛇形握把说明 - Lewis Manufacturing
一次性使用的握把每次使用后都应丢弃。对于多用途握把和转环(又称检查和使用),每次使用后,请取下蛇形握把,检查、清洁并将其存放在干燥且受保护的地方,以免蛇形握把暴露在恶劣环境中,例如海上钻井平台或其他含盐、腐蚀性环境。
蛇形握把说明 - Lewis Manufacturing
一次性使用的握把每次使用后都应丢弃。对于多用途握把和转环(又称检查和使用),每次使用后,请取下蛇形握把,检查、清洁并将其存放在干燥且受保护的地方,以使蛇形握把不会暴露在恶劣环境中,例如海上钻井平台或其他含盐、腐蚀性环境。

有利于大陆俯冲的蛇形化板界面的证据
大陆俯冲的动力学在很大程度上受俯冲通道所涉及的岩石的流变特性控制。蛇形矿在地质应变速率下的粘度较低。然而,仍然缺乏大陆俯冲过程中蛇纹石通道的引人注目的地球物理证据。在这里,我们表明,沿欧洲板和上覆的亚得里亚海地幔之间的板界面,在西阿尔卑斯山下方发现异常低的剪切波速度。我们建议这些地震速度表明弱化石蛇纹石通道的堆叠残留物,其中包括在海洋流量和地幔北向蛇形蛇状岩形成的深蛇纹石片,由从支撑板的散发器释放而成。我们的结果表明,这种蛇形化的板界面可能有利于将大陆壳俯冲到上地幔中,以及超高压力变质岩石的形成/发掘,提供了新的限制,以发展大陆俯冲动力学的概念和定量理解。
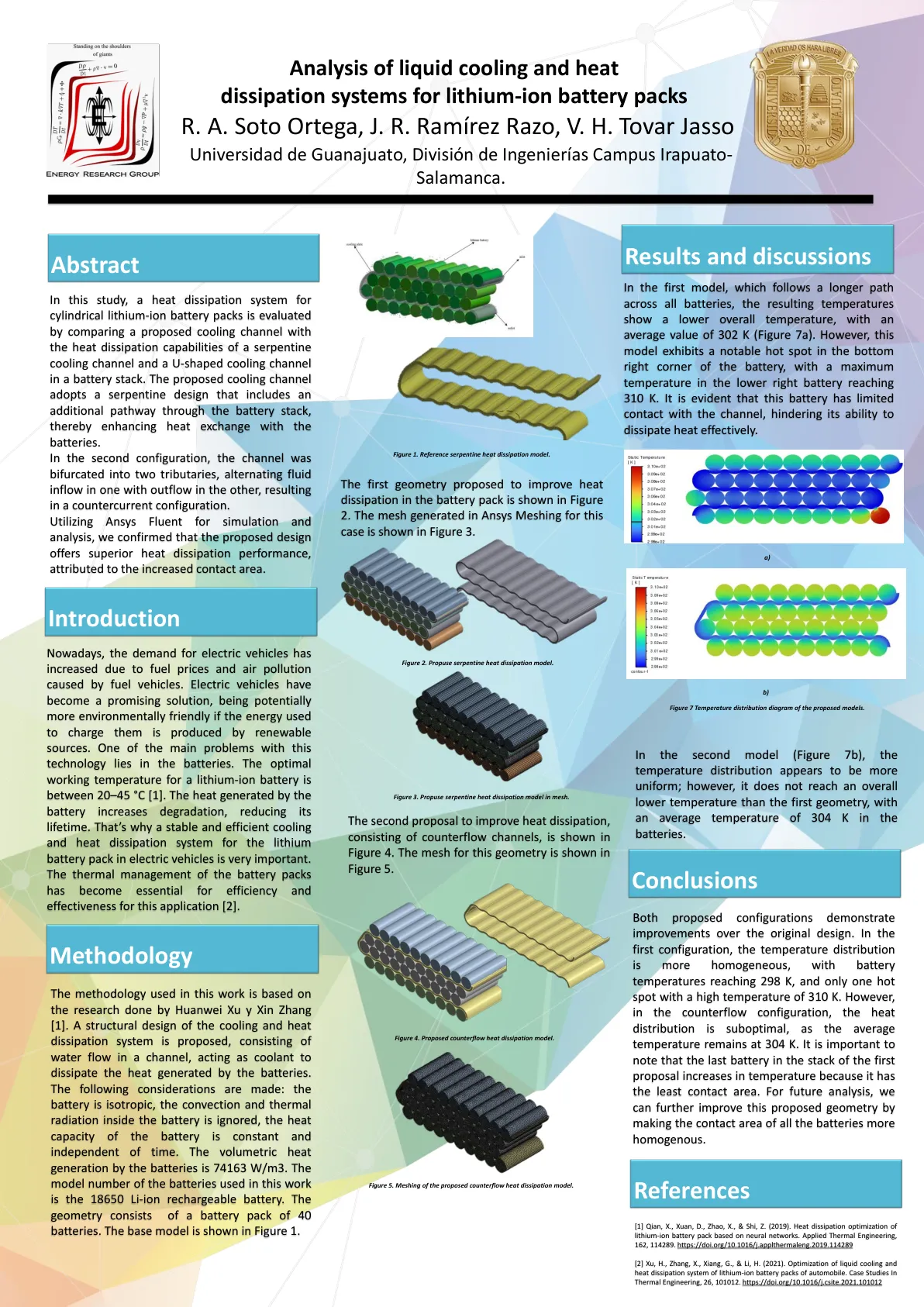
Ra Soto Ortega,JrRamírezRazo,VH Tovar Jasso
在这项研究中,通过比较提出的冷却通道与蛇形冷却通道的热量耗散能力和电池堆栈中U形冷却通道的热量耗散能力来评估圆柱形锂离子电池组的热量耗散系统。提议的冷却通道采用了蛇形设计,其中包括通过电池堆栈的额外途径,从而增强了与电池的热量交换。在第二个配置中,将通道分叉为两个支流,将流体流体交替出现在另一种流出中,从而产生了逆流配置。利用ANSYS Fluent进行模拟和分析,我们确认所提出的设计提供了出色的散热性能,这归因于增加的接触面积。

技术规格 - Cowichan 表演艺术中心
前补声 2x Meyer PSM-2 620 瓦 (DSL& DSR) 歌舞表演/舞台扬声器 2x Meyer UPQ-1P (吊挂在舞台后部) 2x Meyer 650-P 自供电超低音 2/18” (可选) 2X EV SX80 (吊挂在舞台前部) 地板监听音箱 8x Outline iSM 112 2x Meyer MJF 210 6x Meyer UM-1P 350 瓦 (舞台) 2x Meyer UM-100P 350 瓦 (舞台) 主 FOH 控制台:位于房间后方中央的 72” x 64” 座舱内 Digico SD8, 120 个 M/S 通道, 48 个 M/S 总线 展台控制台:位于房间后方右侧的控制室,打开窗户 Digico S21, 40 个 M/S 通道, 10 个 VCA, 16 个 M/S总线、10X8 矩阵、Reaper 录音就绪监视器控制台 SL 翼:Digico S21、40 通道 M/S 48 通道、Reaper 录音就绪选配:Midas X32,带 DL32 舞台箱、桌面推子或 iPad 控制数字蛇形输入 (DSL) 48 通道 Digico D2 机架,Madi 由所有 Digico 控制台控制。控制室中的第二个 D2。总共 96 个输入,32 个输出。1X Digico 48X8 Madi-Rack(仅限 SD8)舞台 XLR 接线板 12 通道 DSR 到 DSL 蛇形头 12 通道返回蛇形头 DSL 到 DSR 16 通道排练室到 DSL 蛇形头
细菌群落和细胞质不相容性诱导沃尔巴基亚的基因组分析,美国蛇形叶子,liriomyza trifolii
liriomyza trifolii,一种农业害虫,偶尔被沃尔巴基亚感染。liriomyza trifolii中存在的沃尔巴氏菌菌株与细胞质不相容性(CI)作用相关,导致胚胎因抗生素治疗或自然无沃尔巴氏菌的菌株与无沃尔巴氏菌的菌株和沃尔巴赫氏菌之间的不相容杂交导致胚胎死亡。在这项研究中,采用高变量rRNA基因的高通量测序来表征沃尔巴契亚感染的未经抗生素治疗的沃尔巴奇氏菌的细菌群落。分析表明,Wolbachia在L. trifolii中主导了细菌群落,而较小的活杆菌,假单胞菌和Limnobacter的存在较小。为了阐明CI表型的遗传基础,还进行了元基因组测序以组装Wolbachia菌株的基因组。Wolbachia菌株W LTRI的草稿基因组为1.35 Mbp,GC含量为34%,包含1,487个预测基因。值得注意的是,在W LTRI基因组中,有三种不同类型的细胞质不兼容因子(CIF)基因:I型,III型和V型CIFA; b。这些基因可能是导致在三乳杆菌中观察到的强细胞质不相容性的原因。
贪吃蛇游戏中人工智能与人类代理的搜索算法比较。
背景:人工智能 (AI) 是计算机科学的核心分支之一。AI 的使用一直在迅速增加。AI 的主要实现来源是游戏。通过使用 AI,游戏中的非玩家角色 (NPC) 得以发展。在游戏中实现 AI 的方法有很多,最常用的方法是搜索方法。在游戏中实现 AI 时使用不同的搜索算法。A 目标:本论文的主要目标是比较 AI 中的搜索算法 () 并与使用蛇形游戏的人类代理进行对比。方法:对搜索算法进行文献综述。根据文献综述的结果,在蛇形游戏中实现了一些算法。结论:从文献综述中,我们总结出了一些最适合搜索算法的算法。经过实验,我们得出结论,A* 搜索算法比广度优先搜索、深度优先搜索、最佳优先搜索、汉密尔顿搜索算法效果更好。

对合规性蛇纹石的实质性曲率影响...
serpentine互连(Serpentines)具有不同曲率程度的蛇形(Serpentines),通常设计用于吸收变形并保护脆弱的活性组件影响的设备。弯曲曲线较小的蛇纹石使用传统理论进行了很好的建模,但这高估了弯曲较大的蛇形的可拉伸性(例如,相对误差超过90%)。在这里提出的是一种新型的理论模型,其中非buck蛇蛇纹石的特征是大型曲面束。得出分析溶液,并据报道系统的实验和数值模拟来验证准确性并研究几何依赖性。发现(i)无量纲的几何参数调节了蛇纹石的兼容力学,(ii)有一定的弧形角可以产生异常的可伸缩性(即归一化的可伸缩性小于统一性),(iii)可以通过两个数量级和五个数量级来增强灵活性和可伸缩性。这项工作是一种构造具有较大曲率的最佳蛇纹石丝带的新方法。
使用 AI 进行训练解决经典贪吃蛇游戏... - ijarcce
摘要:一种用于提高电子竞技玩家技能的 AI 机器人。AI 机器人使用最佳优先搜索 (BFS)、带前向搜索的 A* 和全能移动算法来自动解决经典的蛇形游戏。玩家可以跟随同时运行的 AI 机器人有效地玩游戏。为了引入 AI Auto-Bot 游戏解算器的概念,对首次在诺基亚手机中推出的经典蛇形游戏进行了研究。游戏以长度为 1 的蛇开始,每次吃一个新水果时,蛇的大小都会增加一。蛇游戏支持的动作模拟方向:“上”、“下”、“左”、“右”。蛇以头部向前移动,然后是身体。游戏在两种情况下终止,即蛇的头部与自己的身体相撞,头部与游戏板的墙壁相撞。关键词:最佳优先搜索、A* 搜索、带前向检查的 A*、随机移动、全能移动。
蛇、虫和导管:用于微创手术的连续和蛇形机器人 2010 年 5 月 3 日星期一 美国阿拉斯加州安克雷奇 组织者
• Neal Tanner,汉森医疗公司(商业化)3 • David Camarillo,汉森医疗公司(机器人导管)5 • Howie Choset,卡内基梅隆大学(蛇形机器人)6 • Pierre Dupont,波士顿儿童医院,HMS(连续机器人)8 • Koji Ikuta,名古屋大学(机器人导管)9 • Joseph Madsen,医学博士,哈佛医学院儿童医院(临床视角)11 • Mohsen Mahvash,波士顿儿童医院,HMS(连续机器人)12 • Rajni Patel,西安大略大学(机器人导管)14 • Cameron Riviere,卡内基梅隆大学(蠕虫机器人)16 • Nabil Simaan,哥伦比亚大学(NOTES)17 • Russell Taylor,约翰霍普金斯大学(蛇形机器人)19 • Robert Webster,范德堡大学(连续机器人)20 •杨光中,帝国理工学院(蛇机器人)23