XiaoMi-AI文件搜索系统
World File Search System视场
可定制的基于地标的场孔径设计,用于自动全脑放射治疗计划
目的:开发和评估一种自动化全脑放射治疗 (WBRT) 治疗计划流程,该流程具有基于深度学习的自动勾勒轮廓和可定制的基于标志的射野孔径设计。方法:该流程包括以下步骤:(1) 使用深度学习技术在计算机断层扫描和数字重建的 X 光片上自动勾勒正常结构轮廓,(2) 使用射束视角定位标志结构,(3) 根据八种不同的标志规则生成射野孔径,以满足不同的临床目的和医生偏好。为进行质量控制,开发了两种并行的射野孔径生成方法。将生成的射野形状和剂量分布的性能与原始临床计划进行比较。来自四家医院的五名放射肿瘤学家评估了计划的临床可接受性。结果:通过临床使用的 182 名患者的视野孔径的豪斯多夫距离 (HD) 和平均表面距离 (MSD) 来评估生成的视野孔径的性能。第一种方法生成的视野孔径的平均 HD 和 MSD 分别为 16 ± 7 和 7 ± 3 毫米,第二种方法生成的视野孔径的平均 HD 和 MSD 分别为 17 ± 7 和 7 ± 3 毫米。第一种方法和第二种方法之间的 HD 和 MSD 差异分别为 1 ± 2 毫米和 1 ± 3 毫米。对 30 位患者进行的视场孔径设计临床审查显示,第一种方法和第二种方法的接受率均为 100%,计划审查显示第一种方法的接受率为 100%,第二种方法的接受率为 93%。第一种方法符合镜片剂量建议的平均接受率为 80%(左镜片)和 77%(右镜片),第二种方法为 70%(左镜片和右镜片),而临床计划的接受率为 50%(左镜片)和 53%(右镜片)。结论:本研究提供了一种自动化流程,其中包含两种视场孔径生成方法,可自动生成 WBRT 治疗计划。定量和定性评估均表明,我们的新流程与原始临床计划相当。
flexdic系统
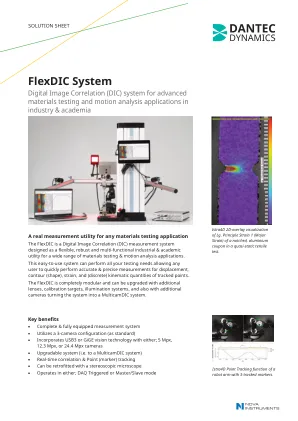
测量原理一个随机模式被应用于测试对象的表面。该图案可以用白色的基颜色喷洒,并在顶部撒上黑色。用两个高速传感器观察到表面。首先测量轮廓,然后使用特定模式匹配算法鉴定随机结构的每个捕获的图像同源点。每个对象点的三维位置由软件执行的三角剖分确定。如果在对象的位移过程中记录了图像序列,则自动计算每个对象点的变形。动态测量范围系统独特地结合了全场光学测量和高节奏分辨率的高空间分辨。动态范围从静态到超过20.000 Hz,其能力从µm范围到几个10 cm的位移。分辨率对应于视场的10-5,例如用于A4纸尺寸测量区域的几µm。菌株范围从100 µScrains不等到数百分之100%。
微纳卫星太阳定向自旋稳定姿态纯磁控制研究
摘要:面向太阳的姿态控制是大多数微纳卫星最重要的姿态控制方式之一,直接影响在轨能量获取,因此采用最简单的传感器和执行器以及最可靠的算法实现面向太阳的姿态控制具有重要意义。提出一种纯磁控制的面向太阳自旋稳定微纳卫星姿态控制方法,控制过程分为初始阻尼阶段、太阳对准阶段、自旋加速阶段和自旋稳定阶段4个阶段。所提方法考虑了轨道阴影区、太阳敏感器及太阳板偏置安装、太阳敏感器视场限制以及环境扰动力矩的影响。通过数值仿真评估了控制性能,仿真结果表明所提方法适用于搭载太阳敏感器和三轴磁力计作为姿态传感器、3个正交安装磁力矩器作为姿态执行器的卫星。所提出的方法适用于大多数地磁场能够提供足够姿态控制扭矩的地球轨道卫星。
南希·格雷斯·罗曼太空望远镜 - 2024 年 1 月
开始勘测天空 南希·格雷斯·罗曼空间望远镜被列为 Astro2010 十年调查中大型太空任务的最高科学优先级,它将在 2020 年代及以后的天体物理学中发挥关键作用。 扩大我们的视野 罗曼的 WFI 将以比哈勃快 1,000 倍的速度勘测天空,收集近红外成像和光谱数据,具有哈勃质量的分辨率和灵敏度,视场比哈勃的 WFC3/IR 大 200 倍。 涵盖所有天体物理学 罗曼 WFI 数据是通过一般天体物理学调查以及计划中的核心社区调查收集的,将丰富天体物理学的研究,使人们能够研究可观测宇宙中几乎所有类别的天文物体、现象和环境。 开放数据访问 罗曼收集的所有数据都是非专有的,所有人都可以通过米库尔斯基空间望远镜档案 (MAST) 获得。罗马任务将在云端托管马赛克、目录和其他数据产品,并将与天文界合作创建开源数据缩减和分析工具。
ALTM Galaxy T1000 - GEO3D
1. 连续操作范围 PulseTRAK™ 技术可消除其他配备多脉冲的传感器常见的数据覆盖间隙和不规则点密度,从而实现真正的连续操作范围。此功能大大简化了任务规划,并在整个数据集中产生一致的数据分布,甚至跨越接收器的“盲区”。» 实现一致的点密度,不再有接收器“盲区”。» 无论地形如何变化,都可以完全自由地进行收集,从而显著提高效率。» 大大简化了任务规划。 2. 动态视场 (FOV) Galaxy 采用 SwathTRAK™ 技术,是第一款采用实时动态 FOV 的传感器,即使在不同的地形高度也能保持固定宽度的扫描带。» 尽管地形高度发生变化,仍能保持规则的点分布并提高点密度的一致性。» 与固定 FOV 传感器相比,航线数量更少,但可最大程度地提高收集效率。 » 与固定 FOV 传感器设计相比,收集成本可节省 40-70%,具体取决于地形变化。
附录 - NPL 出版物
是相机系统能够检测到目标的最小距离。自主系统的传感器系统可能没有标称最小可检测范围,因此原则上它可以是 0 米。雷达利用 FMCW 调制的自主系统的典型雷达传感器没有标称最小可检测范围,因为原则上它可以是 0 米。相机典型的单声道相机系统没有标称最小可检测范围,因此它可以是 0 米。但是,立体相机设置并非如此,因为视场必须有显著的重叠。超声波理论上,最小可检测范围由声波波长的一半给出,这设定了约 5 毫米的理论极限。但是,如上所述,声刺激的脉冲性质会导致发射器传感器中产生振铃,并且在传感器切换到接收器模式以捕获反射能量之前会有延迟。当需要量化与目标的实际距离时,这种振铃将实际系统的最小可检测范围限制在 15 厘米左右,而当需要检测物体的简单存在时,最小可检测范围则低至 3 厘米。
Galaxy PRIME 机载激光雷达地形测绘仪
1.连续操作范围 PulseTRAK™ 技术通过消除其他配备多脉冲的传感器中常见的数据覆盖间隙和不规则点密度,实现了真正的连续操作范围。此功能大大简化了任务规划,并在整个数据集中产生一致的数据分布,甚至跨越接收器“盲区”。» 实现一致的点密度,不再有接收器“盲区”。» 无论地形如何变化,完全自由收集可显著提高效率。» 大大简化了任务规划。2.动态视场 (FOV) Galaxy 采用 SwathTRAK™ 技术,是唯一一款采用实时动态 FOV 的传感器,即使在不同的地形高度下也能保持固定宽度的扫描带。» 尽管地形高度发生变化,仍能保持规则的点分布并提高点密度一致性。» 与固定 FOV 传感器相比,航线数量更少,可实现最大收集效率。» 与固定 FOV 传感器设计相比,收集成本可节省 40-70%,具体取决于地形变化。

低功耗车内参考设计
此设计旨在为客户提供具有成本优化物料清单的即用型小型毫米波车内雷达传感器。在此设计中,由 PMIC 导轨(3.3V、1.8V 和 1.2V)供电的 AWRL6432 设备无需多个 DC-DC 转换器,并使设计具有极小的外形尺寸。为此板设计的天线能够提供 120°(方位角)× 120°(仰角)视场、3.5GHz 带宽和 6 至 7dBi 峰值增益,并采用高性能 Rogers ® RO3003 ® 材料。此参考设计还采用了 TI 的低成本、小型、低功耗 Derby PMIC 和 CAN PHY。板载连接器(J1、J2 和 J3)引出各种通信外设(UART、RS232、SPI、CAN、LIN、JTAG、I2C、GPIO)、SOP、PWR 和 GND,包括一个专用的 10 针连接器 (J1),用于直接连接 LP-XDS110,从而简化了电路板的操作。设计中使用的板载连接器间距为 1.27 毫米,这也有助于减小电路板的整体尺寸。

战斗锻造的视觉神经寄生虫我使用拳击疗法
同型视场失败经常会损害对大脑的Amborn或Chias Painter的视觉轨迹的损害[36]。患病率约为30%同源性偏式(HH)是后脑动脉区域中风后最常见的视觉障碍之一[31]。HH关于患者在日常活动中的独立性(例如阅读,烹饪,驾驶或空间导航)的界面通常很重要。由于这些残疾,生活质量受到了显着限制,并且患者还报告了违反主观投诉的几年[27]。仅大约10%的HH患者在头两周内完全康复。部分自发恢复仅发生在亚急性期,而在10-12周后,偏侧的程度通常保持恒定[37,38]。许多患者自发地采用策略来弥补其盲人半领域[39、40、8、26]。这些补偿策略中的某些策略不够甚至适得其反,许多患者继续在日常生活中表现出障碍。因此,HH的康复至关重要,应该尽早开始。各种研究有分化[33,13]。第一件事是通过反复的感觉刺激恢复盲人半场
操作概念描述更新 - RETINA
ADS-B 自动相关监视 – 广播式 AH 抽象层次结构 AOIS 航空运行信息系统 AR 增强现实 A-SMGCS 先进地面运动引导和控制系统 ATC 空中交通管制 ATCO 空中交通管制操作员 ATCR 空中交通管制雷达 ATM 空中交通管理 COO 协调员 CTOT 计算的起飞时间 CWP 管制员工作位置 DEL 交付 DTD 接地距离 EID 生态界面设计 EOBT 预计起飞时间 ER 探索性研究 ETOT 预计起飞时间 FDP 飞行数据处理 FOV 视场 GGV 注视、手势、语音 GND 地面 HDE 低头设备 HMD 头戴式显示器 ICAO 国际民用航空组织 IFR 仪表飞行规则 IHP 中间等待点 ILS 仪表着陆系统 IMC 仪表气象条件 JU 联合承诺 LOC 航向道 LVP 低能见度程序 OOT 离开塔台 PP 伪飞行员 PSR 主监视雷达雷达无线电探测和测距