XiaoMi-AI文件搜索系统
World File Search System训练量

神经反馈训练中的虚拟现实技术综述
第 35 卷 第 8 期 计算机辅助设计与图形学学报 Vol.35 No.8 2023 年 8 月 Journal of Computer-Aided Design & Computer Graphics Aug. 2023


数量 1 单位 1 名称
(7)其他 A.须在投标开始前提交《资格审查结果通知书》一份。若您已经提交过,则无需再次提交。 若申请人由代表人或其他代理人代为竞投,则其须于竞投开始前提交《授权委托书》。 邮寄投标应清楚写明公司名称、投标日期和时间、投标主题,并用红色写明“投标书已附上”,并于7月24日星期三下午5点之前邮寄到下述地址。此外,投标人还将提前通过邮件收到投标意向通知。 如果您希望参加投标,您必须于7月18日星期四下午3点之前通过传真或其他方式提交市场价格调查文件。 投标人必须提交“驻军使用标准合同”和“投标和合同指南”(可在东部陆军会计团网站https://www.easternarmy.gov/上获取)。「go jp/gsdf/eae/kaikei/eafin/index html」或泷原警备队会计局办公室。 通过提交您的出价,您将被视为承诺遵守“关于排除有组织犯罪集团的承诺”。投标文件中应当包含下列声明作为接受的表示: “本公司(本人(若为个人)、本公司(若为团体))承诺遵守本承诺书中关于排除有组织犯罪的事项”。若拒绝提交上述“排除有组织犯罪承诺事项”的承诺书,则无法参加投标。若在初次投标时有通过邮寄方式提交的投标人,则重新投标的时间如下。

语义增强图像-文本预训练模型的零样本三维模型分类
Cheraghian 等人 [ 21 – 23 ] 在零样本 3 维模型分类方 面提出了 3 维点云的零样本学习方法、缓解 3 维零样 本学习中枢纽点问题的方法和基于直推式零样本学 习的 3 维点云分类方法,并将它们封装进一个全新 的零样本 3 维点云方法 [ 24 ] 中。以上方法均是利用已 知类样本的点云表征及其词向量对未知类别进行分 类,开创了零样本 3 维模型分类方法。近年来, CLIP 在零样本图像分类上取得了良好的效果,因此有研 究者将 CLIP 应用到零样本 3 维模型分类方法中, Zhang 等人 [ 25 ] 提出了基于 CLIP 的 3 维点云理解 (Point cloud understanding by CLIP, PointCLIP) 模型, PointCLIP 首先将 3 维点云投影成多个深度图,然 后利用 CLIP 的预训练图像编码器提取深度图特 征,同时将类别名称通过 CLIP 预先训练的文本编 码器提取文本特征。但是 PointCLIP 的性能受到深 度图和图像之间的域差异以及深度分布的多样性限 制。为了解决这一问题,基于图像 - 深度图预训练 CLIP 的点云分类方法 (transfer CLIP to Point cloud classification with image-depth pre-training, CLIP2Point) [ 26 ] 将跨模态学习与模态内学习相结合 训练了一个深度图编码器。在分类时,冻结 CLIP 的图像编码器,使用深度图编码器提取深度图特 征,该方法缓解了深度图和图像间的模型差异。用 于 3 维理解的图像 - 文本 - 点云一致性表征学习方法 (learning Unified representation of Language, Im- age and Point cloud for 3D understanding, ULIP) [ 27 ] 构建了一个图像、文本和点云 3 种模态的 统一嵌入空间,该方法利用大规模图像 - 文本对预 训练的视觉语言模型,并将 3 维点云编码器的特征 空间与预先对齐的视觉 - 文本特征空间对齐,大幅 提高了 3 维模型的识别能力。与之相似的是,基于 提示文本微调的 3 维识别方法 (CLIP Goes 3D, CG3D) [ 28 ] 同样使用 3 元组形式确保同一类别的 3 维模 型特征和图像特征之间以及 3 维模型特征和文本特 征之间存在相似性,从而使点云编码器获得零样本 识别的能力。另外, PointCLIP V2 [ 29 ] 在 Point- CLIP 的基础之上,通过利用更先进的投影算法和 更详细的 3 维模型描述,显着提高了零样本 3 维模型 分类准确率。本文采用语义增强 CLIP 解决图像和文 本的语义鸿沟问题,通过在语义层面为图像和文本 提供更多相似的语义信息,使图像和文本对齐更具有 一致性,从而有效提高 3 维模型的零样本分类性能。 2.2 提示工程
人形机器人的GhatGPT时刻已至
从进展看,特斯拉居首,且从芯片、数据训练、大模型到本体制造、运控模型均自研自产,25年已制定千台量 产目标。其次为英伟达,其具备强大的算力能力+数据训练平台优势,利用微软芯片、数据、大模型、开发平 台,为人形机器人公司打造底层开发生态,已与14家人形公司合作。其次为Google,从放弃本体聚焦机器人 大模型,到再次牵手机器人公司合作下一代人形机器人,具备大模型能力。 OpenAI目前通过投资和自己小规模 研发机器人本体,尚未All in。苹果和Meta目前专注机器人细分感知领域,平台推出机器人感知系统ARMOR 可用于机械臂,Meta此前收购Digit触觉传感器团队。


该特征为CT图像的脂肪条带。
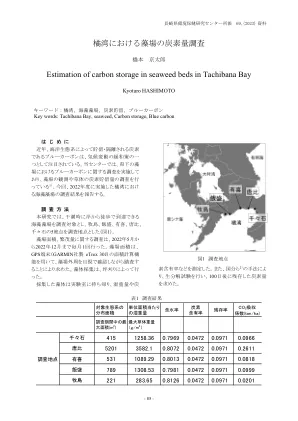
【摘要】以往利用人工智能在CT图像上辅助诊断结肠炎的研究,多以消化道造影剂使用后的结肠壁厚度作为特征,但诊断准确率并不高。本研究验证了结肠炎脂肪条带(HU)的CT值是结肠炎检测模型中一个有用的特征。从187例非造影结肠炎CT图像中,制作将患处切成128×128矩阵的原始图像、擦除脂肪条带以外结构的掩模图像、仅显示脂肪条带的阈值图像。SVM分类器输出原始图像、掩模图像、阈值图像的分类准确率,结果显示掩模图像和阈值图像的分类准确率较原始图像有所提高,说明脂肪条带是一个分类准确率较高的特征。