XiaoMi-AI文件搜索系统
World File Search System贝沃夫

自动驾驶的人为因素视角
a 代尔夫特理工大学生物力学工程系,代尔夫特,荷兰;b 苏黎世联邦理工学院,新加坡未来弹性系统 - ETH 中心,新加坡;c 南安普顿大学工程与环境学院,交通研究组,南安普顿,英国;d 法国交通、发展与网络科学技术研究所,人体工程学与认知科学实验室,法国;e 代尔夫特理工大学交通与规划系,代尔夫特,荷兰;f 格罗宁根大学行为与社会科学学院,心理学系,格罗宁根,荷兰;g 特温特大学交通研究中心,特温特,荷兰;h 荷兰应用科学组织,荷兰索斯特贝格,TNO 人为因素研究所;i 慕尼黑工业大学机械工程系,人体工程学研究所,德国慕尼黑;j 瑞典国家道路与交通研究所,VTI,瑞典;k 利兹大学交通研究所,英国利兹; l 英国沃金厄姆交通研究实验室人为因素与模拟组;m 比利时布鲁塞尔 ITS 欧洲 ERTICO;n 荷兰海牙道路安全研究所 SWOV
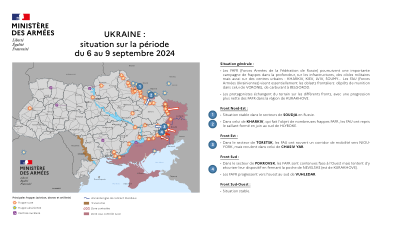
乌克兰:2024 年 9 月 6 日至 9 日期间的情况
• 俄罗斯联邦武装力量 (FAFR) 正在继续对基础设施、军事目标以及城市中心进行大规模深度打击:哈尔科夫、基辅、利沃夫、苏米等。乌克兰武装部队 (AFU) 主要针对边境地区:沃罗涅伊 (VORONEJ) 的弹药库和别尔哥罗德 (BELGOROD) 的燃料库。
自动驾驶的人为因素视角
a 代尔夫特理工大学生物力学工程系,代尔夫特,荷兰;b 苏黎世联邦理工学院,新加坡未来弹性系统 - ETH 中心,新加坡;c 南安普顿大学工程与环境学院,交通研究组,南安普顿,英国;d 法国交通、发展与网络科学技术研究所,人体工程学与认知科学实验室,法国;e 代尔夫特理工大学交通与规划系,代尔夫特,荷兰;f 格罗宁根大学行为与社会科学学院,心理学系,格罗宁根,荷兰;g 特温特大学交通研究中心,特温特,荷兰;h 荷兰应用科学组织,荷兰索斯特贝格,荷兰应用科学组织人为因素研究所;i 慕尼黑工业大学机械工程系,人体工程学研究所,德国;j 瑞典国家道路与交通研究所,VTI,瑞典;k 利兹大学交通研究所,英国l 英国沃金厄姆交通研究实验室人为因素与模拟组;m 比利时布鲁塞尔 ITS 欧洲 ERTICO;n 荷兰海牙道路安全研究所 SWOV

詹妮弗·沃特曼·沃恩(Jennifer Wortman Vaughan)
Jennifer Wortman Vaughan Microsoft Research,纽约市jenn@microsoft.com 300 lafayette Street jenn@jennwv.com纽约,纽约,纽约,纽约10012 http://jennwv.com 2024年5月更新了我对人与AI系统之间的互动感兴趣的研究兴趣。近年来,我一直专注于这种互动,这是Microsoft的Fate Group和Microsoft透明度工作组的一部分。以前,我经常在预测市场和其他众包系统的背景下研究这种互动。我的研究背景是机器学习和算法经济学。但是,由于人们在机器学习生命周期中发挥的核心作用,我现在将人类受试者实验甚至定性方法编织到我的研究中,以更好地了解社会技术系统中的人类行为。宾夕法尼亚州费城宾夕法尼亚州教育大学

Article.pdf -Munin
1格兰瑟姆气候变化与环境研究所,伦敦经济与政治学院,伦敦霍顿街,伦敦街,WC2A 2AE,英国2,英国2融合空间与天体物理学中心,沃里克沃里克,吉布贝特山路,吉布贝特山路,科文特里大学,科文特里大学,英国7Al,英国3麦克库特王国3麦克库尔特,美国公共政策,吉尔特街2000年,吉尔特大学4.数学和统计学,科学技术学院,UIT - 挪威北极大学,N-9037Tromsø,挪威5号国际太空科学研究所,Hallersstrasssse 6,3012 Bern,瑞士6,瑞士6物理学和天文学研究所弗罗茨瓦劳斯基科学大学,韦斯皮安斯基哥27,50-370弗罗克劳,波兰8阿基泽理论上物理学国家科学中心“哈尔基夫物理与技术研究所”,61108乌克兰乌克兰,乌克兰,伦敦玛丽·玛丽·玛丽·玛丽·玛丽·玛丽·玛丽·玛丽·玛丽·伊斯兰教,乌克兰,乌克兰9号,伦敦玛丽·玛丽·玛丽·玛丽·玛利亚,实验室,伦敦W6 8RH,英国伦敦8RH 8 Margravine Gardens
美国 dwight 0. bswhower (cvn 69)
在海上连续航行 41 天后,IKE 于 11 月 21 日停靠雅典港,开始了为期 5 天的港口访问。在雅典港口期间,IKE 举办了几项活动,包括 11 月 22 日的国会访问。国会议员尼尔·史密斯夫妇、国会议员汤姆·贝维尔夫妇、国会议员约翰·迈耶斯夫妇、国会议员劳伦斯·考夫林夫妇、国会议员韦斯利·沃特金斯夫妇、国会议员伯纳德·德怀尔夫妇、管理事务副国务卿罗纳德·斯皮尔斯夫妇以及 13 名工作人员和陪同人员参观了船只并共享了感恩节晚餐。11 月 23 日,IKE 号船员们观看了美国秀“快乐时光”,其中包括电影和电视界的名人。演员阵容包括安森·威廉姆斯、玛丽安·罗斯、洛里·马哈菲、约翰·沃姆斯利、丽莎·哈里森·沃姆斯利、布赖恩·米切尔、辛西娅·罗兹和支持音乐家。


马尔可夫的独立和分散学习...
算法1独立和分散学习动力学初始化:n 0(s)= 0,∀s∈S; 〜n 0 i(s,a i)= 0,〜q 0 i(s,a i)= 0,π0i(s,a i)= 1 / | A I | ,∀(i,a i,s)和θi∈(0,1)。在迭代0中,每个玩家都会观察S0∈S,选择其动作A 0 I〜π0 I(S 0),然后观察R 0 I = U I(S 0,A 0)。在每个迭代中t = 1,2,...,每个玩家都会观察到S t,并且独立更新{n t,〜n t i,〜q t i,πt i}。更新n t,〜n t i: