XiaoMi-AI文件搜索系统
World File Search System负载

电池储能与循环负载发电厂集成的经济性评估
摘要 —本文讨论了在具有周期性负荷曲线的工厂(通常是钢铁厂)及其自己的电能来源(通常是蒸汽轮机)中,使用基于电池的储能系统进行调峰的简化经济评估。有几种可能的动机和/或好处有待探索。本文重点研究了涡轮机和 BESS 与总投资和运营成本之间的最佳尺寸。提出了一种集成到这些工厂的方法。提出了一种电池储能系统 (BESS) 运行的控制策略。影响在于纳入所有经济上重要的因素。最后,根据钢铁厂负荷图和其他关键因素定义和评估案例研究。结论部分讨论了该应用的技术经济潜力。

用于晶圆上测量应用的毫米波直通负载元件
摘要 — 本文介绍了一种创新的直通负载元件,旨在用于毫米波频率下的特性分析应用。根据直流控制电压,所提出的结构可以用作直通连接或 50 Ω 负载。除其他潜在应用外,该系统还可用于实现转换开关或衰减器。演示器采用 STM 55 纳米 BiCMOS 技术制造和测量。在 55 GHz 至 170 GHz 的宽带宽上,实验测量表明,当用作直通连接时,插入损耗最大为 1.6 dB,当用作 50 Ω 负载时,插入损耗最小为 14 dB。在这两种情况下,回波损耗都优于 10 dB。90 GHz 的插入损耗对于直通连接为 0.6 dB,对于 50 Ω 负载连接为 20 dB。
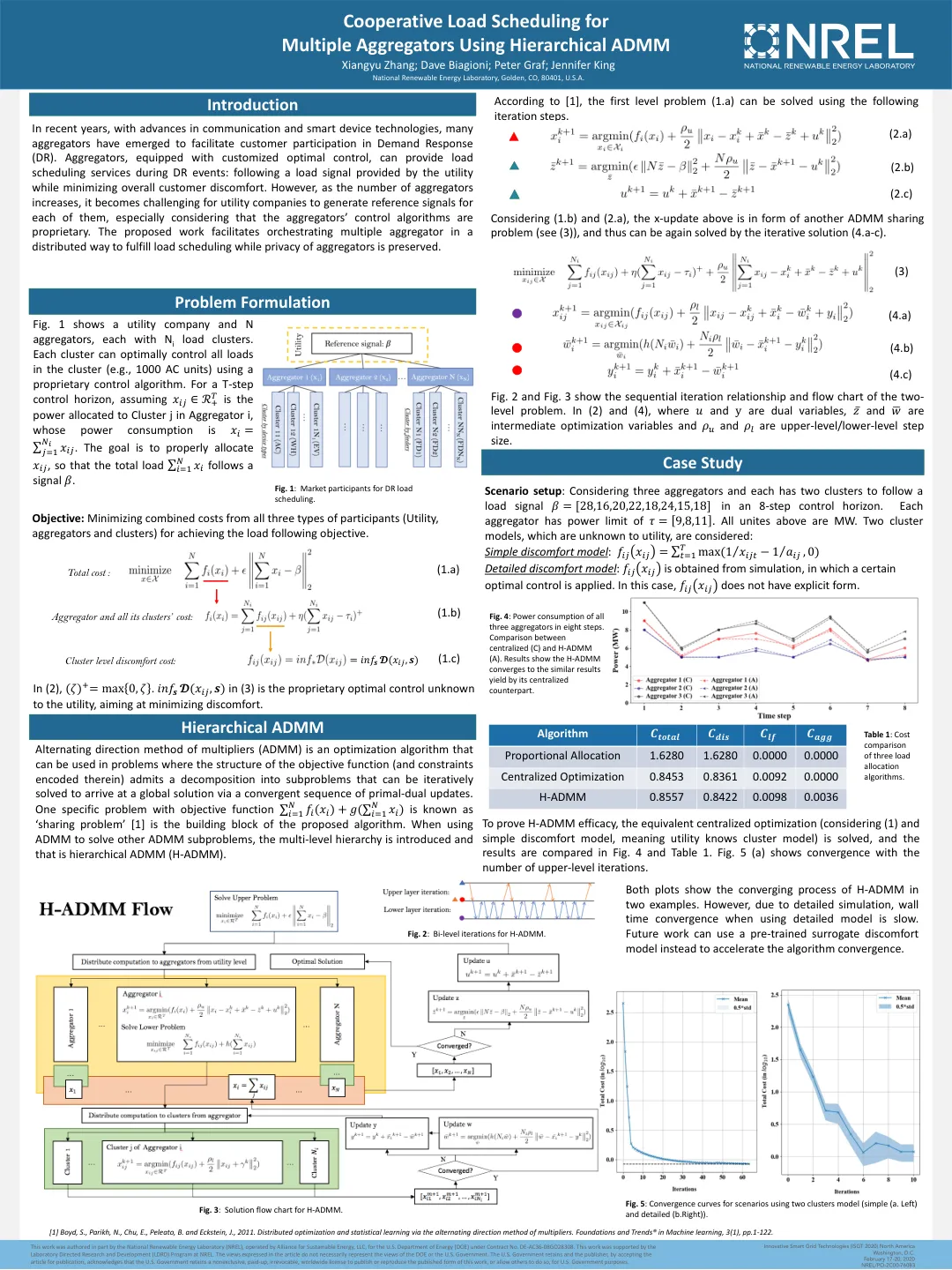
使用分层 ADMM 实现多个聚合器的协同负载调度
近年来,随着通信和智能设备技术的进步,许多聚合器应运而生,以促进客户参与需求响应 (DR)。配备定制最优控制的聚合器可以在 DR 事件期间提供负载调度服务:遵循公用事业提供的负载信号,同时最大限度地减少客户的整体不适。然而,随着聚合器数量的增加,公用事业公司为每个聚合器生成参考信号变得越来越具有挑战性,尤其是考虑到聚合器的控制算法是专有的。所提出的工作有助于以分布式方式协调多个聚合器以实现负载调度,同时保护聚合器的隐私。

基于计算机视觉的实时识别桥梁结构性健康监测的车辆负载
摘要:各种加载条件的耦合效应可能会导致偏转,定居点甚至在服务桥梁的失败。不幸的是,尽管它是最关键的负载之一,但通过桥梁监控系统目前为可持续操作,很难实时捕获行驶车辆的加载条件。要充分了解桥梁的状态,必须在动态的交通环境中获得瞬时车辆负载分布。尽管有一些可以识别超重车辆的方法,但捕获的车辆相关信息却分散且不完整,因此无法支持有效的桥梁结构性健康监测(BSHM)。本研究提出了一种基于视觉的非接触式方法,用于识别车辆负载,以实时监测桥梁结构健康。该提出的方法由四个主要步骤组成:(1)使用Yolov7为车辆建立双对象检测模型,(2)在桥面上开发一个混合坐标转换模型,(3)为移动车辆的实时轨迹监视的多对象跟踪模型,以及(4)建立级别融资模型的车辆和位置,并为车辆的负载和位置确定型号和位置。所提出的方法有效地可视化3D时空车辆载荷分布,速度低30fps。结果表明,混合坐标转换可确保车辆位置误差在1 m以内,与传统方法相比降低了5倍。轴距是通过双对象检测和转换来计算的,是车辆位置校正的主要参考。与传感器测得的速度相比,保留了车辆的轨迹和实时速度,平滑速度误差均低于5.7%。作者设想所提出的方法可以构成一种新的方法来进行实时的服务桥梁。
使用模拟运动和LIDAR测量的基于机器学习的虚拟负载传感器
摘要。漂浮的海上风力涡轮机(FOWTS)配备了各种传感器,可为涡轮机监视和控制提供有价值的数据。由于技术和运营挑战,用于精确获得的系泊线和Fairleads的负载估计可能很难且昂贵。这项研究深入研究了一种方法,其中将模拟的浮游运动测量和风速测量得出,从前瞻性的基于Nacelle的Lidar得出,被用作不同类型的神经网络的输入,以估计Fairlead张力时间张力时间序列和损害等效载荷(DELS)。fairlead张力与浮游器的动力学和作用本质上相关。因此,我们系统地分析了浮油动力学对Fairlead张力时间序列和DELS预测质量的个人贡献。通过基于NACELLE的LIDAR获得的风速测量值在近海风力涡轮机上固有地影响了平台的动力学,尤其是旋转螺距的位移和流量器的潮流位移。因此,激光雷达风速数据间接包含浮雕的动态行为,这反过来又控制着Fairlead载荷。这项研究杠杆测量的视线(LOS)风速以估计Fairlead紧张局势。该模型的训练数据是由启用的风力涡轮机仿真工具与数值LIDAR模拟框架Vicondar一起生成的。使用长期短期内存(LSTM)网络预测Fairlead张力时间序列。del预测是使用三种不同方法进行的。首先,DEL是根据预测的时间序列计算得出的。其次,使用序列至一lstm体系结构预测DELS,第三,使用卷积神经网络体系结构预测DELS。结果表明,可以从浮游运动时间序列中准确估算Fairlead张力时间序列和DEL。此外,我们发现LiDAR LOS测量值不会改善时间序列或如果可用运动测量结果。然而,使用LiDar测量作为DEL预测的模型输入,导致与使用层的位移测量相似的精度。

双标准近似算法,用于负载平衡的无关机器,成本
我们研究了具有成本限制的无关机器上的负载平衡问题的广义版本:给定一组M机器(某些类型)和一组n个工作,在机器上处理的每个作业j都需要P i,j时间单位,并造成成本ci,j,j,j,j,j,j,and j,该目标是为一项工作的工作时间,该工作时间是有序的,这些工作是有序的,该工具是有序的。优化了机器完成时间的矢量的某些客观函数,但要受到以下限制,即按时间表总成本必须在给定的预算范围内b。是由文献的最新结果激发的,我们的重点是机器类型数量是固定常数的情况,我们为研究问题开发了双标准近似方案。我们的结果在某些特殊情况下概括了几个已知结果,例如带有相同机器的情况,或具有恒定数量具有成本限制的机器的情况。构建了Jansen和Maack [15]最近提出的优雅技术,我们构建了一种更通用的方法,该方法可用于将近似方案推导到具有约束条件的更广泛的负载平衡问题上。

培训冲动及其对大学和专业足球运动员的负载管理的影响
摘要:方法:训练冲动(TRIMP)是通过可穿戴技术获得的,并在足球运动员的负载管理中发挥了直接作用。重要的是要了解Trimp以最好地为运动员准备比赛。使用Google Scholar进行了系统的搜索文章搜索,并由五个审稿人筛选和提取论文。纳入标准是:该研究的重点是大学或专业足球,使用训练冲动(TRIMP)以及使用可穿戴技术来测量TRIMP。10,090篇文章。选择了十篇论文进行最终审查,并根据(1)培训与比赛(n = 8/10),(2)季前赛与季后赛(n = 3/10)和(3)位置比较(n = 3/3/10)进行分组。可穿戴技术主要是跟踪物理指标(n = 10/10)。在整个赛季中,在训练中,在整个赛季中,在开始中的TRIMP数据比储备金更高,而在训练期间,对于初学者而言,Trimp略低。Trimp数据在整个赛季中变化,季前阶段比赛季早期,赛季中期和后期阶段更高。这些发现有助于强调Trimp在管理足球内部球员负载方面的好处。未来的研究应着重于利用可穿戴的Trimp以及对玩家性能指标的影响,以及TRIMP数据在足球中的不同位置之间的变化。

混合能源系统基于状态流的能源管理策略,以减轻负载脱落
1电气系统中心,马来西亚Teknologi大学电气工程学院,马来西亚Johor Bahru 81310; muhammad.paend@buitms.edu.pk或paend.bakht@graduate.utm.m.my(M.P.B.); waqas.anjum@iub.edu.pk(W.A.); saifulnizam@utm.my(S.A.K.)2 Bal路支省信息技术大学电气工程系,工程与管理科学大学(BUITMS),Quetta 87300,巴基斯坦3号Quetta 87300,3 38000,FAISALABAD 38000,巴基斯坦,巴基斯坦官立大学Faisalabad(GCUF)电气工程和技术系; bhatti_abdulrauf@gcuf.edu.pk 4电子工程系,巴格达校园,巴哈瓦尔布尔伊斯兰大学巴哈瓦尔布尔大学,巴哈瓦尔布尔63100,巴基斯坦5,巴基斯坦5工业技术学院,马来西亚宾夕法尼亚州11800,马来西亚,马来西亚,马来西亚,马来西亚,马来西亚,马来西亚; nuzhat_khan@student.usm.my *通信:zainals@fke.utm.my2 Bal路支省信息技术大学电气工程系,工程与管理科学大学(BUITMS),Quetta 87300,巴基斯坦3号Quetta 87300,3 38000,FAISALABAD 38000,巴基斯坦,巴基斯坦官立大学Faisalabad(GCUF)电气工程和技术系; bhatti_abdulrauf@gcuf.edu.pk 4电子工程系,巴格达校园,巴哈瓦尔布尔伊斯兰大学巴哈瓦尔布尔大学,巴哈瓦尔布尔63100,巴基斯坦5,巴基斯坦5工业技术学院,马来西亚宾夕法尼亚州11800,马来西亚,马来西亚,马来西亚,马来西亚,马来西亚,马来西亚; nuzhat_khan@student.usm.my *通信:zainals@fke.utm.my

通过数据驱动的共享控制方法降低机器人群的认知负载
摘要 - 多种机器人系统在医学,环境监测等各种领域的多种影响都增加了。尽管有明显的优势,但群体的协调对人类运营商带来了重大挑战,尤其是关于有效控制机器人所需的认知负担。在这项研究中,我们提出了一种新的方法,可以使人类操作员有效控制多个机器人的运动。利用共享控制数据驱动的方法,我们使单个用户能够控制与群体的姿势和形状相关的9度自由度。我们的方法是通过在模拟的3D环境中进行的实验运动进行了评估的,该环境具有狭窄的圆柱路径,可以代表例如血管,工业管道。使用经验后的问卷评估了认知载荷的主观测量,并比较了系统的不同级别的自主权。结果表明,与传统的远程操作技术相比,操作员认知负载的大幅减少,伴随着任务绩效的提高,包括减少完成时间和与障碍的接触实例更少。这项研究强调了我们方法在增强人类机器人相互作用和提高多机器人系统中运行效率方面的效率。