XiaoMi-AI文件搜索系统
World File Search System超端

超系统超信赖
工业或实验室应用中,全面管控的制程设有最高的纯度和品质,其中包含,其中包含去离子水或较低等级的超纯水。对于最初的工业水处理以及为,必须准确控制和确树脂的两阶段来影响全部阳离子和阴离子的去除。实保持水的物理特性、参数和浓度。去离子系统使用离子交换 实保持水的物理特性、参数和浓度。去离子系统使用离子交换 实保持水的物理特性、参数和浓度。去离子系统使用离子交换 实保持水的物理特性、参数和浓度。去离子系统使用离子交换 实保持水的物理特性、参数和浓度。去离子系统使用离子交换 实保持水的物理特性、参数和浓度。去离子系统使用离子交换 实保持水的物理特性、参数和浓度。去离子系统使用离子交换 实保持水的物理特性、参数和浓度。去离子系统使用离子交换 实保持水的物理特性、参数和浓度。去离子系统使用离子交换,gf piping Systems为这些严苛的黏着和过滤过程提供高品质的系统,满
超电导web21
国际超导工业技术中心(主席:Araki Hiroshi)的超导工程研究所(教师Tanaka Shoji)开发了一个4x4超导数据包开关,该开关在40GHz工作,大约100倍,大约100倍。开关容量为5mm平方芯片上的每秒160千兆位(Gbps),已经与商业可用的高端路由器的开关相同,该路由器的尺寸为几十厘米。通过扩大将来的规模,可以实际使用大容量数据包开关,从而破坏半导体的技术极限。 这种超高速度超导路由器开关开发的技术背景在以下几点中。换句话说,如果信息和通信跟踪以年龄的2到3倍的速度增加,到2010年,核心路由器的容量将需要数十TBP,这是当前容量的数百倍。但是,该发展是由于在半导体中将路由器能力提高到该水平的困难而激发了发展。此外,超导开关被认为最有可能使用称为SFQ的电路,该电路的原理与半导体不同,并且近年来制造和电路设计技术的快速进步一直是技术开发背后的主要推动力。 该SFQ电路是一种通过操作单个单元量子SFQ的每个单元(英文名称,单通量量子)来处理信息的设备技术,尽管它比半导体更快地操作,但它会消耗低功率,从而使高度积分较少。开关电路这次开发了4,200个基于尼伯的超导式约瑟夫森连接,并且具有4x4(4个输入和4个输出)开关函数,可以大规模扩展。 该报告的结果于2004年4月19日在IEEE高性能转换和路由(HPSR)的研讨会上宣布,这是在美国亚利桑那州凤凰城举行的国际路由器相关会议。 (Hidaka Mutsuo,SRL/ISTEC设备研发部低温设备开发办公室主任,编辑办公室Tanaka Yasuzo)
氧化镍超导体在高温下超高...
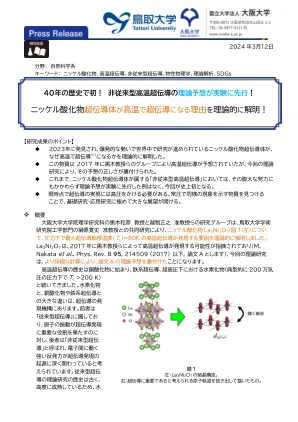
在第二年,铜氧化物 *2中高温超导性的发现是极快的杰作,并且是一部杰作,它将留在科学史上。自2000年代初以来,Kuroki教授及其小组一直在研究实现TC的策略,该策略超过了氧化铜。尽管可以在理论模型的范围内实现高T C,但使用真实材料实现这一点并不容易。经过各种考虑,黑子教授和其他人在2017年的论文A中发现,即使不是理想的理论模型本身,La 3 Ni 2 O 7也可以达到类似的情况。六年后的2023年5月,来自中国中央大学的一个小组在其预印式服务器Arxiv上宣布,La 3 Ni 2 O 7在压力下以T C = 80K的最大t c = 80K表现出高温超导性,并于9月在自然界发表(H. Sun等人,自然,自然621,493(20233))。自从本文出现在5月的Arxiv上以来,Kuroki教授,Sakakibara副教授和Ochi副教授已经开始了联合研究,并于6月发表了有关Arxiv的论文。从那时起,关于ARXIV的大量相关实验和理论论文已经发表,并且在全球范围内一直在蓬勃发展。
氧化镍超导体在高温下超高...
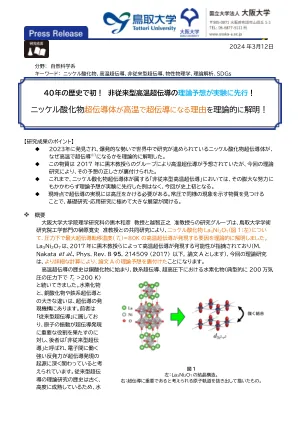
在第二年,铜氧化物 *2中高温超导性的发现是极快的杰作,并且是一部杰作,它将留在科学史上。自2000年代初以来,Kuroki教授及其小组一直在研究实现TC的策略,该策略超过了氧化铜。尽管可以在理论模型的范围内实现高T C,但使用真实材料实现这一点并不容易。经过各种考虑,黑子教授和其他人在2017年的论文A中发现,即使不是理想的理论模型本身,La 3 Ni 2 O 7也可以达到类似的情况。六年后的2023年5月,来自中国中央大学的一个小组在其预印式服务器Arxiv上宣布,La 3 Ni 2 O 7在压力下以T C = 80K的最大t c = 80K表现出高温超导性,并于9月在自然界发表(H. Sun等人,自然,自然621,493(20233))。自从本文出现在5月的Arxiv上以来,Kuroki教授,Sakakibara副教授和Ochi副教授已经开始了联合研究,并于6月发表了有关Arxiv的论文。从那时起,关于ARXIV的大量相关实验和理论论文已经发表,并且在全球范围内一直在蓬勃发展。

终端管制技术交流会议
壹、目的 ............................................................................................................................... 3
基于近端策略优化算法及视觉感知的机械臂导纳控制研究
在现代操纵器交互任务中,由于环境的复杂性和不确定性,准确的对象表面建模通常很难实现。因此,改善操纵器与环境之间相互作用的适应性和稳定性已成为相互作用任务的重点之一。针对操纵器的互动任务,本文旨在在视觉指导下实现良好的力量控制。因此,基于Mujoco(带有触点的多关节动力学)物理引擎,我们为操纵器构建了交互式仿真环境,并创新地集成了基于位置的视觉伺服控制和录取控制。通过深度强化学习(DRL)中的近端策略优化(PPO)算法,有效地集成了视觉信息和力量信息,并提出了结合视觉感知的接收性控制策略。通过比较实验,将允许控制与视觉感知相结合,并将力控制的整体性能提高了68.75%。与经典的入学控制相比,峰值控制精度提高了15%。 实验结果表明,在平坦和不规则的凹面环境中,允许控制与视觉感知结合表现良好:它不仅可以准确地执行视觉构成的力控制任务,而且还可以在各种接触表面上维持施工力,并迅速适应环境变化。与经典的入学控制相比,峰值控制精度提高了15%。实验结果表明,在平坦和不规则的凹面环境中,允许控制与视觉感知结合表现良好:它不仅可以准确地执行视觉构成的力控制任务,而且还可以在各种接触表面上维持施工力,并迅速适应环境变化。在精确组装,医疗援助和服务操纵器的领域中,它可以提高操纵器在复杂和不确定的环境中的适应能力和稳定性,从而促进智能操纵器的自主操作的发展。

强于大市AI 端侧深度报告之AI 手机
智能手机是最适合承载端侧 AI 的载体, AI 手机可提供差异化的用户价 值与品牌价值。智能手机具有保有量大、使用便携、使用场景多、使用 时长久、应用生态系统强大等优势,可创造众多的 AI 使用场景,并加速 第三方 AI 应用成熟,我们认为智能手机将是生成式 AI 最佳的应用载体 之一。 AI 手机的定义具有三个典型特征:①能够在手机端侧运行大模型; ② SoC 中包含 NPU 算力;③达到一定参数要求的性能指标。 AI 手机可提 供差异化的用户价值与品牌价值。对用户而言, AI 手机将是自在交互、 智能随心、专属陪伴、安全可信的个人化助理,使用体验较目前阶段智 能手机大幅提升。对于手机厂商而言,可提供品牌形象与用户粘性。
讯飞AI 考试系统学生手机端使用说明
1.下载 ............................................................................................................................................... 3