XiaoMi-AI文件搜索系统
World File Search System超网

超系统超信赖
工业或实验室应用中,全面管控的制程设有最高的纯度和品质,其中包含,其中包含去离子水或较低等级的超纯水。对于最初的工业水处理以及为,必须准确控制和确树脂的两阶段来影响全部阳离子和阴离子的去除。实保持水的物理特性、参数和浓度。去离子系统使用离子交换 实保持水的物理特性、参数和浓度。去离子系统使用离子交换 实保持水的物理特性、参数和浓度。去离子系统使用离子交换 实保持水的物理特性、参数和浓度。去离子系统使用离子交换 实保持水的物理特性、参数和浓度。去离子系统使用离子交换 实保持水的物理特性、参数和浓度。去离子系统使用离子交换 实保持水的物理特性、参数和浓度。去离子系统使用离子交换 实保持水的物理特性、参数和浓度。去离子系统使用离子交换 实保持水的物理特性、参数和浓度。去离子系统使用离子交换,gf piping Systems为这些严苛的黏着和过滤过程提供高品质的系统,满
超电导web21
国际超导工业技术中心(主席:Araki Hiroshi)的超导工程研究所(教师Tanaka Shoji)开发了一个4x4超导数据包开关,该开关在40GHz工作,大约100倍,大约100倍。开关容量为5mm平方芯片上的每秒160千兆位(Gbps),已经与商业可用的高端路由器的开关相同,该路由器的尺寸为几十厘米。通过扩大将来的规模,可以实际使用大容量数据包开关,从而破坏半导体的技术极限。 这种超高速度超导路由器开关开发的技术背景在以下几点中。换句话说,如果信息和通信跟踪以年龄的2到3倍的速度增加,到2010年,核心路由器的容量将需要数十TBP,这是当前容量的数百倍。但是,该发展是由于在半导体中将路由器能力提高到该水平的困难而激发了发展。此外,超导开关被认为最有可能使用称为SFQ的电路,该电路的原理与半导体不同,并且近年来制造和电路设计技术的快速进步一直是技术开发背后的主要推动力。 该SFQ电路是一种通过操作单个单元量子SFQ的每个单元(英文名称,单通量量子)来处理信息的设备技术,尽管它比半导体更快地操作,但它会消耗低功率,从而使高度积分较少。开关电路这次开发了4,200个基于尼伯的超导式约瑟夫森连接,并且具有4x4(4个输入和4个输出)开关函数,可以大规模扩展。 该报告的结果于2004年4月19日在IEEE高性能转换和路由(HPSR)的研讨会上宣布,这是在美国亚利桑那州凤凰城举行的国际路由器相关会议。 (Hidaka Mutsuo,SRL/ISTEC设备研发部低温设备开发办公室主任,编辑办公室Tanaka Yasuzo)

“光伏+”储能微网电站设计要点分析
1)随着分布式光伏统筹上网电价逐年下降以及储能系统成本降低,建设分布式+储能系统实现 分布式电源全部就地消纳具有较好的经济效益,同时利用储能系统每天“两充两放”的特性, 合理利用阶梯电价,提高系统效益。With the distributed PV grid prices and the energy storage system cost decreasing every year, there is good economic benefit to build the distributed + energy storage system to achieve all the local power consumption, and because the energy storage system charges and discharges twice every day, the step tariff , if well employed, can increase the system benefit. 2)通过能量管理系统控制分布式电源+储能系统平滑输出,减小外部气象条件对分布式电源输 出的影响,提高供电电能质量。Achieving smooth output from the distributed power supply + energy storage system by the energy management system, reducing the impact to the distributed power output from the external weather conditions and improving the quality of power supply. 3)通过分布式电源+储能系统组成并网型微电网系统,当电网故障时,自动切换至独立运行模 式,保持重要负荷连续供电/或者利用储能系统代替企业原有设计起到后备电源(UPS)的作 用。When the grid breaks down, the microgrid system that is composed of the distributed power supply + energy storage system automatically switches to stand-alone mode, which maintains continuous power supply or uses energy storage system to replace the UPS in the original design.
氧化镍超导体在高温下超高...
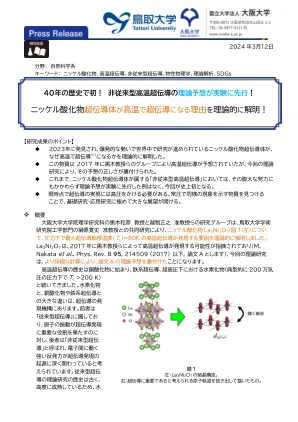
在第二年,铜氧化物 *2中高温超导性的发现是极快的杰作,并且是一部杰作,它将留在科学史上。自2000年代初以来,Kuroki教授及其小组一直在研究实现TC的策略,该策略超过了氧化铜。尽管可以在理论模型的范围内实现高T C,但使用真实材料实现这一点并不容易。经过各种考虑,黑子教授和其他人在2017年的论文A中发现,即使不是理想的理论模型本身,La 3 Ni 2 O 7也可以达到类似的情况。六年后的2023年5月,来自中国中央大学的一个小组在其预印式服务器Arxiv上宣布,La 3 Ni 2 O 7在压力下以T C = 80K的最大t c = 80K表现出高温超导性,并于9月在自然界发表(H. Sun等人,自然,自然621,493(20233))。自从本文出现在5月的Arxiv上以来,Kuroki教授,Sakakibara副教授和Ochi副教授已经开始了联合研究,并于6月发表了有关Arxiv的论文。从那时起,关于ARXIV的大量相关实验和理论论文已经发表,并且在全球范围内一直在蓬勃发展。
氧化镍超导体在高温下超高...
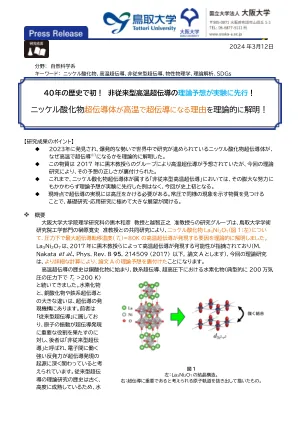
在第二年,铜氧化物 *2中高温超导性的发现是极快的杰作,并且是一部杰作,它将留在科学史上。自2000年代初以来,Kuroki教授及其小组一直在研究实现TC的策略,该策略超过了氧化铜。尽管可以在理论模型的范围内实现高T C,但使用真实材料实现这一点并不容易。经过各种考虑,黑子教授和其他人在2017年的论文A中发现,即使不是理想的理论模型本身,La 3 Ni 2 O 7也可以达到类似的情况。六年后的2023年5月,来自中国中央大学的一个小组在其预印式服务器Arxiv上宣布,La 3 Ni 2 O 7在压力下以T C = 80K的最大t c = 80K表现出高温超导性,并于9月在自然界发表(H. Sun等人,自然,自然621,493(20233))。自从本文出现在5月的Arxiv上以来,Kuroki教授,Sakakibara副教授和Ochi副教授已经开始了联合研究,并于6月发表了有关Arxiv的论文。从那时起,关于ARXIV的大量相关实验和理论论文已经发表,并且在全球范围内一直在蓬勃发展。


面向偏远地区供电可靠性提升的配网储能电站机会 ...
2.3 运行约束 储能电站的规划与运行决策存在强耦合关 系。在不同位置接入储能电站将对系统运行的安 全性、经济性与可靠性造成不同影响。为了支持网 侧储能选址定容方案的科学决策,需充分考虑储能 充放电特性、有功 / 无功综合潮流、电压偏移限制、供 电可靠性要求等关键因素,进行精细化的运行建 模。故引入运行约束如下。 2.3.1 功率平衡约束

宋超阳博士|助理教授|南方科技大学
硕士研究生(2013-2014)Yin Bangqi新加坡设计与麻省理工学院(2013-2014)Aditya Ranjan新加坡技术与设计与MIT大学(2016-2017)WU TONG MONASH大学(2018-2018-2018-2018-2020)Liu Sheng Sheng Sheng Electronics Designitute(2018-2020-220)加入了Shaoyin Tech。(2020-2023)冯·施豪(Rveng Shihao)加入了Rvbust Tech。(2020年至2023年)郭尤辛加入了香港公共服务部(2021-2024)Jie Yu Master Class of 2024(2021-2024)Jiang Bingfa Master Class of 2024 of 2024(2021-2021-2025) (2022-2025)Xu Ronghan Master Class 2025(Robocon Sustech的团队负责人)(2023-2026)Huang Bangchao Master Class of 2026
利用超网和可学习的内核来预测各种消费者类型的消费能量
摘要 - 消费者能源预测对于管理能源消耗和计划,直接影响运营效率,降低成本,个性化的能源管理和可持续性工作至关重要。近年来,深入学习技术,尤其是LSTM和变形金刚在能源消耗的预测领域取得了巨大成功。尽管如此,这些技术在捕获综合和突然的变化方面存在困难,而且,通常仅在特定类型的消费者(例如,只有办公室,只有学校)上对它们进行检查。因此,本文提出了超能量,这是一种消费者能源预测的策略,利用超网络可用来改善适用于多样化消费者的复杂模式的建模。超网络负责预测主要预测网络的参数。由多项式和径向基函数内核组成的可学习的可自适应核纳入了增强性能。对拟议的超能量进行了评估,包括各种消费者,包括学生住宅,独立的房屋,带电动汽车充电的房屋和联排别墅。在所有消费者类型中,超能量始终超过10种其他技术,包括最先进的模型,例如LSTM,PoastionLSTM和Transformer。