XiaoMi-AI文件搜索系统
World File Search System跑道标记
模拟器培训在空中交通管制中的重要性
为 ATC 学生设定了各种教学目标,以帮助提高他们的信心。模拟器训练包括紧急程序和援助、特定地点的定位、用语、程序和协调、团队合作、跑道标记和飞行数据。因此,模拟器训练有助于建立信心,因为 ATC 学生要处理高强度的交通问题和复杂的跑道配置(Taylor 等人,2)。模拟器训练很重要,因为它使管制员具备必要的技能、准备和信心来处理高压情况,例如各种天气条件下的尾流湍流。ATC 学生还学习如何处理交叉跑道和平行跑道上同时到达和离开的情况。模拟器训练通常教授预期的分离、精确的计时和任务的优先级。这些模拟训练节点确保管制员可以使用有节奏的无线电传输,同时使用最小跑道离场分离。模拟训练作为空中交通管制训练的教学补充,有助于培养信心。基于模拟器的训练提高技能
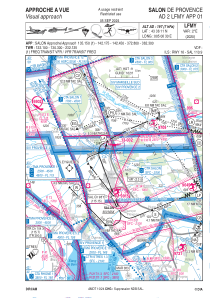
APPROCHE A VUE 视觉方法 SALON DE PROVENCE AD 2 LFMY APP 01
AD 的使用条件 飞越 AD 禁止在 300 米(1000 英尺)以下的 H24 ASFC AD 仅可在白天使用 AD 禁止用于武装 ACFT AD 禁止用于不带无线电的 ACFT 除 TWY 和 RWY 外,AD 不可用 限制使用 AD:1 - 主要用于接收 MIL 和国家空中交通 2- 用于在那里授权的特定活动 3- 用于基于 AD LDG 的 ACFT,并遵守发送给 DV / OPS 极点负责人的 PPR。同意的 NR 必须填写在 FPL 的第 18 框中 同意的 NR 填写在 FPL 的第 18 框中 CTR 和 CTA 激活时间之外 SALON:自我信息频率 RWY 16/34:滑入雨天 BAR AERAZUR F30 类型 5 在跑道两端,高度:1.5 米 对于 TORA、ASDA 和 LDA,实际距离可在跑道标记结束前 50 米处获得 VFR 特殊反应堆: VIS :5 公里 升限:1000 英尺 常规: 能见度:3 公里 升限:1000 英尺 HEL:能见度:800 米 升限:600 英尺 特殊程序和说明 AD 的东部保留给 GLD、无人驾驶飞行、“学校”发动机飞行和特技训练。LF- R 276 活跃的法国巡逻兵需要强制绕行,除授权的 ACFT 滑行计划外,限制 TWY 和 PRKG: - TWY 3:关闭 - C130: - 仅限 VIP PRKG - 禁止 TWY 7、8 和 9 - A400M:禁止 PRKG 和 TWY < /div >

FAA-E-2772B.pdf
1.2 系统概述 RVR 是一个必不可少的系统,由硬件和软件组成,用于计算飞行员在跑道上能看到多远的距离。看到的物体可能是跑道灯或跑道标记。RVR 系统为各种用户提供可靠的 RVR 测量,包括:当地机场交通管制塔 (ATCT) 驾驶室和终端雷达进近管制 (TRACON) 空中交通管制员;增强型交通管理系统 (ETMS)/协同决策 (CDM) 用户(航空公司调度员);自动地面观测系统 (ASOS) 和自动气象传感器系统 (AWSS) 用户;以及机场运营中心人员。目前,国家空域系统 (NAS) 中部署了两种类型的 RVR 系统:Tasker 500 透射仪系统,部署于 20 世纪 60 年代末;以及 1994 年首次部署的新一代 RVR (NGRVR)。本规范中建立的性能要求适用于基于 PC 的 RVR 系统,该系统基于已在 NGRVR 中证明成功的系统要求和组件概念。当前操作系统的经验和商业系统的明显可用性表明,前向散射仪技术是当前 NAS RVR 系统的首选能见度传感器类型,因此,基于 PC 的 RVR 系统也将采用该技术。通过使用现代商业产品和组件,基于 PC 的 RVR 应超出本规范的可靠性、可维护性和可用性目标。基于 PC 的 RVR 系统可以与 NAS 内机场的现有 NG RVR 系统共置。在这种情况下,基于 PC 的 RVR 系统必须接收 NG RVR 系统数据并将其与基于 PC 的系统的类似数据集成,以表示相关 RVR 机场配置的 RVR 条件。

LFRK - 卡昂卡尔皮凯 - dircam
可用设施和设备 22.3.1 RWY 31 配备: 跑道 31 配备: - - 仅 ILS CAT 1, - - 由单向白灯组成的 420 米 HI 进近坡道。一条长 420 米、由单向白灯组成的进场坡道 LIH。 RWY 13 未配备 ILS 或进近坡道。 13 号跑道未配备 ILS 或进近坡道。车道 22.3.2 交通车道 22.3.2 在低速车道 (LVP) 条件下: 在低速车道 (LVP) 下: - 可用的车道:A1。 - 可用车道:A1。可用的握持点:A1。 - 可用跑道前的等待点:A1。通讯 22.3.3 通讯 22.3.3 当 LVP 程序生效时,飞行员会通过 ATIS 收到通知。当 LVP 程序生效时,ATIS 会通知飞行员。 LVP 实施和结束标准 22.3.4 当能见度在 550 米至 400 米之间或云层 < 200 英尺时,LVP 有效。当能见度在 550 米至 400 米之间或云层高度小于 200 英尺时,LVP 有效。 LVP 持续有效,直到标准(RVR 和云层高度)被大幅超越。 LVP 持续有效,直到触发 LVP 的标准(RVR 和云层高度)被大幅超越为止。 - 抵达时无 LVP。 - 抵达时无 LVP。 - 在机动区域内,流通范围仅限于单个移动设备。 - 整个机动区域内仅限一辆车通行。照明 22.3.5 标志 22.3.5 RWY 标志:白天地面标志 - 跑道和转弯区域的边缘照明 - THR LIH。跑道标记:通过标记(白天) - 跑道上的侧灯和折返灯 - HI 中的阈值。其他照明:等待点 A1 的 RWY 保护灯 (Wig-Wag) - 义务面板 - TWY A1 边缘照明。其他照明:A1 跑道前等待点的跑道保护灯 (Wig-Wag) - 强制性标志 - TWY A1 侧灯。

危害识别指南
执行摘要 安全风险评估是安全管理系统中的一项功能,而安全风险评估的一个重要要素是识别危险。危险可以被视为一种潜在的危害,它以某种形式存在于航空系统或其环境中。这种危害可能以自然危险(如地形)或技术危险(如错误的跑道标记)的形式出现。本文件在安全风险管理框架内开发了“危险”的概念,该框架还定义了风险、安全事件、不良事件、结果、后果和风险控制(障碍或缓解措施)。描述了危险识别方法(数据驱动和定性)背后的基本概念。然而,人们承认,很难宣布危险识别过程的完整性,因此应定期审查危险识别。此外,人们进一步认识到,航空系统涉及由各种不同利益相关者(航空公司、机场、空中导航服务提供商和维护、维修和大修公司等)运营的技术和以人为本的子系统之间的复杂互动。每个组织都应管理属于其管理控制范围内的危险,但也应与其他利益相关者合作,帮助管理互动和界面。总结了一些用于危险识别的具体工具和技术,并指出了它们的优缺点。这些工具和技术包括: • 头脑风暴 • 危险和可操作性研究 (HAZOPS) • 检查表 • 故障模式和影响分析 (FMEA) • 结构化假设 (SWIFT) • 动态模型 • 通过 FAST 方法识别未来危险 安全风险评估过程中的另一个关键步骤是安全评估文档,还描述了使用危险日志记录危险识别输出的方法,并提供了示例危险日志模板。附件中还提供了可用于识别危险的一些危险和信息来源示例。免责声明:所提供的所有信息仅具有一般性,并非旨在解决任何特定个人或实体的具体情况。它可用作指导工具,但在任何情况下都不能替代正式通过的立法和监管规定,例如可接受的合规手段或指导材料。此类建议的采纳需自愿承诺,且仅由支持这些行动的人承担责任。它并非旨在且不应被依赖为对 ESSI/ECAST、其参与者或附属组织具有法律约束力的任何形式的保证、陈述、承诺、合同或其他承诺。因此,ESSI/ECAST 及其参与者或附属组织对内容或因使用这些建议中包含的信息而导致的任何行动不承担任何责任。