XiaoMi-AI文件搜索系统
World File Search System跟踪性能

基于二次编程的参考传播控制,用于双臂机器人操作,并计划同时影响
摘要 - 以进一步实现机器人操作中有意影响的目的,呈现了一个控制框架,呈现了directlytacklestheChalgesthAllengesposedbybytracking-tracking-tracking-trol tracking-troct-trol trol tracking-trol torl of机器人操纵剂,这些操作机构被任命执行同时同时产生影响。该框架是参考扩展(RS)控制框架的扩展,其中定义了与影响动态一致的反对和后影响引用。在这项工作中,从基于远距离的方法开始构建了这样的参考。通过在二次编程控制方法范围内使用相应的撞击和后影响控制模式,在保持高跟踪性能的同时,避免了速度误差的峰值和由于影响引起的控制输入。包含新型的临时模式,我们还旨在避免在环境中的不确定性导致一系列计划外的单个影响发生时发生的输入峰和步骤,而不是计划的同时影响。这项工作尤其是在第一次对机器人设置的RS控制的实验评估,与三种基线控制方法相比,它对环境中的不确定性进行了鲁棒性。

基于视觉的无人机传感系统实时空中物体定位与跟踪
摘要 —本文主要研究基于视觉的无人机导航障碍物检测与跟踪问题。通过将物体检测和跟踪有效地集成到动态卡尔曼模型中,开发了一种从单目图像序列中进行实时物体定位和跟踪的策略。在检测阶段,通过每帧图像背景连接线索计算出的显著性图自动检测和定位感兴趣的物体;在跟踪阶段,采用卡尔曼滤波器对物体状态进行粗略预测,然后通过结合显著性图和两个连续帧之间的时间信息的局部检测器进一步细化预测。与现有方法相比,所提出的方法不需要任何手动初始化跟踪,运行速度比同类最先进的跟踪器快得多,并且在大量图像序列上实现了具有竞争力的跟踪性能。大量实验证明了所提出方法的有效性和优异的性能。

基于扩展状态观测器的 U 模型增强双滑模控制的四旋翼飞行器轨迹跟踪
本文基于多输入多输出扩展状态观测器 (MIMO-ESO),为四旋翼飞行器开发了一种新型 U 模型增强型双滑模控制器 (UDSMC)。UDSMC 采用 Lyapunov 合成和 Hurwitz 稳定性设计,不仅可以消除复杂的动力学和非线性,还可以稳定底层四旋翼飞行器的不确定性和外部干扰。MIMO-ESO 旨在估计不可测量的速度,从而可以减少传感器测量误差在实践中的影响。该控制设计成功解决了与四旋翼飞行器速度测量干扰和不确定的空气动力学相关的困难。进行了严格的理论分析,以确定所提出的控制系统是否能够实现稳定的轨迹跟踪性能,并进行了实时比较实验研究,以验证所提出的控制系统比内置 PID 控制系统更有效。© 2022 作者。由 Elsevier Ltd 代表富兰克林研究所出版。这是一篇根据 CC BY 许可协议开放获取的文章 ( http://creativecommons.org/licenses/by/4.0/ )

在混乱环境中基于激光雷达的空中跟踪的分散群轨迹生成
摘要 - 具有多个无人机(UAV)的航空跟踪在各种应用中具有广泛的潜力。但是,现有的群追踪作品通常缺乏在混乱环境中保持高目标可见性的能力。为了解决这种缺陷,我们提出了一个分散的计划者,该计划者可以最大化目标可见性,同时确保无碰撞的动作进行群体跟踪。在本文中,首先通过分散的动力学搜索前端对每个无人机的跟踪性能进行了分析,该搜索为初始化安全的飞行走廊和可见扇区提供了最佳的指导路径。之后,满足走廊约束的多项式轨迹是由空间 - 周期性优化器产生的。车间碰撞和避免阻塞也被纳入优化目标。通过与其他尖端作品进行广泛的基准比较来验证我们方法的范围。与基于自主激光雷达的群体系统集成在一起,提出的计划者在现实世界中展示了其效率和鲁棒性,这些实验杂乱无章。

采用分段多项式的非线性控制分配...
摘要 —非线性控制分配是基于现代非线性动态逆的飞行控制系统的重要组成部分,该系统需要高精度的飞机气动模型。通常,精确实施的机载模型决定了系统非线性的消除效果。因此,更精确的模型可以更好地消除非线性,从而提高控制器的性能。本文提出了一种新的控制系统,该系统将非线性动态逆与基于分段多线性表示的控制分配相结合。分段多线性表示是通过对块矩阵的克罗内克积的新泛化,结合非线性函数的规范分段线性表示而开发的。还给出了分段多线性模型的雅可比矩阵的解析表达式。所提出的公式给出了分段多线性气动数据的精确表示,因此能够精确地模拟飞机整个飞行包线内的非线性气动特性。所得到的非线性控制器用于控制具有十个独立操作控制面的无尾飞翼飞机。两种创新控制面配置的仿真结果表明,可以实现完美的控制分配性能,与普通的基于多项式的控制分配相比,具有更好的跟踪性能。

基于无人机的量子通信链路.pdf
移动平台之间的量子网络可实现安全通信、分布式量子传感器和分布式量子计算。随着未来量子互联网的不断进步,将移动平台(例如无人机、智能车辆、船舶和飞机)连接到量子网络仍然是一项挑战。例如,现实世界移动平台的工程约束要求量子系统具有小尺寸、小重量和小功率 (SWaP)。此外,必须将单光子路由到运动中并经历振动的平台。在此努力中,我们讨论了在多种配置(无人机到无人机、无人机到移动车辆和车辆到车辆)中开发和展示移动无人机和车辆平台之间的量子通信链路(包括诱饵态量子密钥分发 (QKD))的进展。我们将讨论和分析关键子系统,包括基于谐振腔发光二极管 (LED) 的诱饵态 QKD 源、紧凑型光学系统设计、指向、采集和跟踪 (PAT) 子系统、单光子探测器、基于现场可编程门阵列的时间标记器以及新颖的时间同步算法。此外,我们还介绍了系统性能,包括在多种条件下的跟踪性能和移动平台配置。

从全局表示对象跟踪中读取相关功能
来自模板或历史框架的参考特征对于视觉对象跟踪至关重要。先验工作利用固定模板或内存的所有功能进行视觉对象跟踪。然而,由于视频的动态性质,在不同时间步骤下,不同搜索区域所需的参考历史信息也不一致。因此,使用模板中的所有功能和内存都会导致冗余并损害跟踪性能。为了减轻此问题,我们提出了一种新颖的跟踪范式,包括相关的注意机制和全球表示记忆,可以自适应地帮助搜索区域从参考特征中选择最相关的历史信息。具体来说,这项工作中提出的相关性注意机制与以前的方法不同,因为它可以通过在全球访问跨框架信息来动态选择和构建当前帧的最佳全局表示内存。此外,它可以灵活地读取构造记忆中的相关历史信息,以减少冗余并抵消有害信息的负面影响。广泛的实验验证了所提出的方法的有效性,并在71 fps的五个挑战数据集上实现了竞争性能。
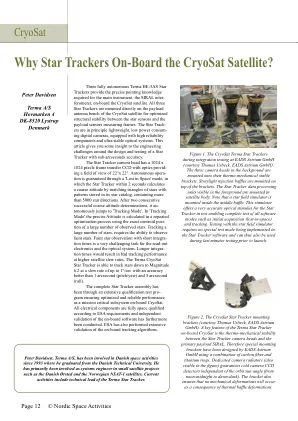
为何 CryoSat 卫星上配备星体追踪器?
1024 像素帧传输 CCD,光学元件提供 22°x 22° 的视野。通过“迷失太空”模式保证自主操作,在该模式下,星体跟踪器在 2 秒内通过将星星的三角形与存储在其星表中的图案进行匹配来计算粗略姿态,其中包含 5000 多个星星方向。连续两次成功确定粗略姿态后,它会自动跳转到“跟踪模式”。在“跟踪模式”下,使用大量观测恒星的精确质心位置,通过重复优化过程计算出精确的姿态。跟踪大量恒星需要能够观察暗淡的恒星。对于读出电子设备和光学系统来说,在短积分时间内观测暗星是一项非常具有挑战性的任务。较长的积分时间会导致卫星旋转速率较高时跟踪性能不佳。Terma CryoSat 星跟踪器能够以高达 1°/秒的旋转速率跟踪低至 6.2 等的恒星,精度优于 1 角秒(俯仰/偏航)和 5 角秒(滚动)。

双轴机载模糊 pid 跟踪控制器... - ijicic
摘要。本文提出了一种基于方位/仰角环跟踪控制器的新型模糊PID控制方案,以提高跟踪实时目标的精度。模糊PID控制器由三个模糊逻辑控制器和一个带模型参考自适应控制的PID控制器组成,其中PID控制器的三个参数的自适应增益由模糊逻辑规则进行微调。所提出的控制算法的隶属函数(MF)与一般算法不同,其中输入和输出的MF彼此不同,例如MF类型,MF数量和显示范围。将所提出的模糊PID控制方法的性能与普通PID控制算法进行了比较。仿真验证了模糊PID控制模型跟踪性能的有效性,该模型具有零超调、良好的瞬态性能和快速收敛跟踪能力。模糊PID跟踪控制算法可以提高系统整体性能,为深入研究基于机载光电稳定平台的控制系统奠定理论基础。关键词:模糊PID,跟踪控制器,优化方案,稳定平台

合作多个机器人操纵器的线性/非线性PID控制:强大的方法A.
摘要:在本文中提出了协作机器人系统的职位/力量控制有效载荷的问题。所提出的方法必须能够在参考轨迹上维护有效载荷的方向/位置,同时通过机器人的末端效应器将有限的力量应用于对象。考虑到这一点,已经提出了线性/非线性PID控制方案,以实现准确稳健的跟踪性能。Lyapunov的稳定性分析用于确认受控系统的稳定性。证明受控系统是稳定的,而对象的方向/位置跟踪误差最终在任何有限的状态空间区域中最终限制为边界(UUB)。它还提供了一些条件,以正确选择以两个定理的形式选择线性/非线性PID控制器的增益。建议的控制器适用于两个配备有效载荷的协调3DOF机器人臂。模拟结果测试了两种类型的轨迹,包括简单和复杂的路径。还将结果与最先进的近似值(Chebyshev神经网络(CNN))的结果进行了比较。