XiaoMi-AI文件搜索系统
World File Search System转发

如果废水排放来自:(根据第 101 条第 7 款,字母 a)、b)、c)、d),则排放物所有者必须转发生活废水同化性的简单信息: f) 和立法令第 7 段之二。 152/06 及后续修正案)- 专门从事土地耕种和/或林业的公司(字母 a); - 致力于畜牧养殖的企业(字母b); - 致力于字母 a) 和 b) 中提到的活动的公司,还开展农业生产转型或增值活动,在公司生产周期中插入正常和功能互补的特征,加工原材料主要来自因任何原因可用的土地的耕种活动(字母 c)。 - 产生排放且其放养密度等于或小于每平方米水 1 公斤或水流量等于或小于每分钟 50 升的水产养殖和养鱼系统,符合(字母d); - 热活动(字母 f) - 炼油厂的植被废水(c.7之二)
如果废水排放来自以下来源,则排放所有者必须转发可吸收到生活废水的简单通信:(根据艺术。立法法令第 101 条第 7 款 a)、b)、c)、d)、f) 项和第 7 款之二。152/06 及其后续修正案)- 专门从事土地种植和/或林业的公司(字母一个); - 从事畜牧业的企业(lett.b ); - 专门从事 a) 和 b) 项所述活动的公司,这些公司还开展农业生产转化或增值活动,这些活动以正常的、功能互补的方式插入公司生产周期中,加工原材料主要来自以任何身份耕种自己可用的土地的活动(lett.c ).- 产生排放的水产养殖和养鱼系统,其特点是养殖密度等于或小于每平方米水面 1 公斤,或水流量等于或小于每立方米 50 升。分钟根据(字面意思d ); - 热活动(字面意思f) - 橄榄油厂废水(c.7 bis)

cxs-1000 多功能软件定义转发器 - L3Harris
本演示文稿包含 L3Harris Technologies 的一般功能信息,不包含《国际武器贸易条例》(ITAR)第 120.10 部分或《出口管理条例》(EAR)第 734.7-11 部分定义的受控技术数据。本文档中包含的数据(包括规格)为摘要性质,L3Harris 可自行决定随时更改,恕不另行通知。请致电了解最新修订版。所有提及的品牌名称和产品名称均为其各自所有者的商标、注册商标或商品名称。ML642 Rev D
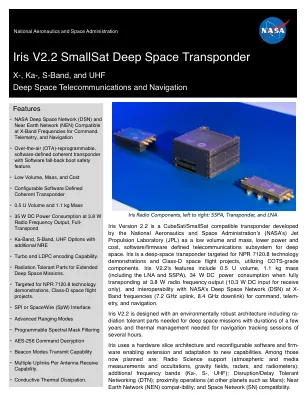
Iris V2.2 SmallSat 深空转发器
Iris 2.2 版是一款兼容立方体卫星/小型卫星的转发器,由美国国家航空航天局 (NASA) 喷气推进实验室 (JPL) 开发,是一种体积小、质量轻、功耗低、成本低的深空软件/固件定义电信子系统。Iris 是一款深空转发器,采用 COTS 级组件,用于 NPR 7120.8 技术演示和 D 类太空飞行项目。Iris V2.2 的特点包括体积为 0.5 U,质量为 1.1 kg(包括 LNA 和 SSPA),在 3.8 W 射频输出(仅用于接收的 10.3 W DC 输入)下完全转发时功耗为 34 W DC,并且能够与 NASA 的深空网络 (DSN) 在 X 波段频率(7.2 GHz 上行链路、8.4 GHz 下行链路)上进行互操作,用于指挥、遥测和导航。

R4A MKII 机载 AIS 转发器 - 萨博
目前,R4A 转发器每天在多种类型的飞机上运行,包括直升机、飞机和无人机。转发器从配备 AIS 的船只和飞机 VHF 覆盖范围内的其他 AIS 站接收数据,如果启用传输,数据还可以发送到其他单元。接收到的数据以标准 AIS 格式输出,并可供外部显示系统等处理。右侧地图显示了使用瑞典军用侦察机 FSR890 进行飞行测试的图。最远的船只距离飞机超过 200 海里。
2005 年 3 月 18 日,委员会致函国会,转发其第十五份年度报告,其中描述了委员会 2004 年与能源部国防核设施有关的健康和安全活动
国防核设施。委员会向能源部长提出建议,委员会认为这些建议对于确保充分保护公众健康和安全是必要的。委员会必须考虑实施建议措施的技术和经济可行性。部长可以全部或部分接受或拒绝建议。如果部长因任何原因全部或部分拒绝建议,委员会不撤回或修改建议,而部长坚持拒绝,部长的决定和理由必须在《联邦公报》上公布,并提供给国会两院。如果由于预算考虑而无法实施建议,部长必须向总统和国会报告。

什么是转发器? - Peel.dk
peel.dk › ... PDF 2011-07-31 — 2011-07-31 飞机。8. 应答器的工作原理。8. 故障排除。... 以数字格式显示气压高度。数字化气压-.
STFTV 转发器验证策略 - 欧洲空中导航安全组织
4.1 定期维护 ................................................................................................ 21 4.2 维护要求及协调 ...................................................................................... 21 4.3 状态程序 .............................................................................................. 22 4.4 目前使用的坡道测试设备 ............................................................................ 22 4.5 测试设备自动化 ...................................................................................... 23 4.6 可能的限制 ............................................................................................. 25 4.7 可能的改进列表 ...................................................................................... 25 4.8 建议 ...................................................................................................... 26 4.9 理由 ...................................................................................................... 27
STFTV 转发器验证策略 - 欧洲空中导航安全组织
4.1 定期维护 ................................................................................................ 21 4.2 维护要求和协调 .................................................................................. 21 4.3 状态程序 ................................................................................................ 22 4.4 目前使用的坡道测试设备 ................................................................................ 22 4.5 测试设备自动化 ............................................................................................. 23 4.6 可能的限制 ................................................................................................ 25 4.7 可能的改进列表 ............................................................................................. 25 4.8 建议 ............................................................................................................. 26 4.9 理由 ............................................................................................................. 27