XiaoMi-AI文件搜索系统
World File Search System转播车

一种非线性模型预测控制策略,用于秤车的自主赛车
摘要 - 本文介绍了旨在控制用于自主赛车竞赛的小型汽车模型的非线性模型预测控制(NMPC)策略。拟议的控制策略涉及将车辆时间最小化,同时将车辆保持在轨道边界范围内。优化问题考虑了车辆的致动极限以及作用于Pacejka魔法公式和简单传动系统模型的汽车上的侧面和纵向力。此外,该方法允许在静态障碍物填充的轨道上安全地竞争,从而产生无冲突的轨迹并跟踪它们,同时增强膝盖正时性能。使用F1/10模拟器的凉亭模拟展示了拟议的控制策略的可行性和有效性。该代码作为开源释放,使得可以复制获得的结果。索引术语 - 非线性模型预测性控制,Au au sopos Racing,F1/10模拟器,自动驾驶汽车导航。
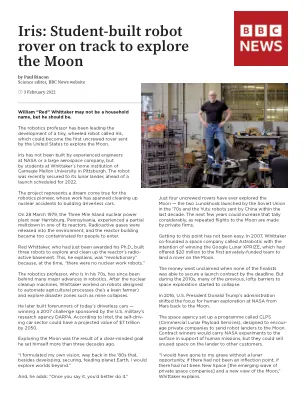
艾瑞斯:学生建造的机器人探测车将用于月球探测
除了这次任务之外,惠特克表示,其他几项创新也有可能改变机器人目前探索太阳系的方式。目前,探测器使用立体视觉来探测地形危险。惠特克表示,如果激光测距技术(称为 Lidar)可以小型化以适合机器人,那将是一个“突破”。

混合延长自行车:高动车轨迹计划的简单模型
摘要 - 虽然高度自动化的驾驶大部分时间都依赖于平稳的驾驶假设,但车辆进行刺激性操纵的可能性很可能是面对意外事件的高动力驾驶的可能性。在这些事件中,车辆行为的建模对于适当的计划和控制至关重要;使用的模型应呈现准确和计算上有效的属性,以确保与车辆动力学的一致性并在实时系统中使用。在本文中,我们提出了一个基于LSTM的混合动力扩展自行车模型,能够针对正常和侵略性情况提供对车辆状态的准确描述。引入的模型用于模型预测路径积分(MPPI)计划和控制框架,用于在高动力场景中执行轨迹。所提出的模型和框架证明了他们计划可行轨迹的能力,即使在处理范围内,也可以确保精确的车辆行为。
欧盟成员国的虚假信息 – 第 2 部分 - EDMO
2 我们要感谢引用的专家和 MPM 国家团队,特别是保加利亚、爱沙尼亚、芬兰、法国、德国、匈牙利、葡萄牙、黑山、北马其顿共和国、斯洛伐克、塞尔维亚和斯洛文尼亚的团队。他们在 MPM 数据收集方面的工作为我们提供了与各自国家虚假信息和相关政策制定工作相关的宝贵见解。此外,斯洛伐克广播和转播委员会的 Stanislav Matejka 帮助我们更好地了解了斯洛伐克的监管情况。

人工智能生成的美国无车城市视觉效果有助于提高对可持续政策的支持
美国高度依赖私家车进行交通运输 [16, 21]。这种依赖是有问题的,因为汽车会导致气候变化,并且比公共交通、步行和骑自行车释放更多的温室气体 [5]。拥有汽车的成本也很昂贵,对低收入个人和家庭来说是一项沉重的经济负担 [12]。此外,汽车浪费了城市中的大量空间,导致交通拥堵和城市扩张 [4]。因此,鉴于其对环境和社会产生的巨大负面影响,迫切需要减少美国的汽车拥有量和使用量 [1, 11]。解决这个问题的一种方法是针对个人消费者并鼓励他们改变行为 [20]。然而,减少私家车使用的举措往往无法改变通勤者的行为 [7]。这主要是因为美国的基础设施极其以汽车为中心,因此使用更可持续的交通方式对消费者来说目前非常不方便。为了解决这个问题,城市规划者和政策制定者被鼓励增加对公共交通基础设施的投资,从而使无车交通更加便捷和可及 [3]。不幸的是,公共交通在美国越来越成为一个两极分化的话题,美国公众和民选官员通常都不愿意支持试图增加这些投资的政策 [13, 6]。在这里,我们展示了如何通过将行为科学的见解与人工智能 (AI) 的最新进展相结合来解决这一问题。心理学方面有大量文献

零工经济通过劳动力市场对产品质量的影响:来自拼车和餐厅质量的证据
本文旨在通过劳动力市场展示零工经济对看似不相关的当地行业的产品质量的影响。我们的实证背景是奥斯汀市餐馆的服务质量,我们研究了它们如何受到共享乘车平台、Uber 和 Lyft 由于监管变化而退出和重新进入该市的影响。我们利用这些外生冲击,并将它们与 Yelp 评论的情绪分析数据相结合,这些数据捕捉了客户如何评估每家餐厅的服务质量。我们发现,与对照城市相比,当 Uber 和 Lyft 出现在奥斯汀市时,奥斯汀的顾客对服务质量的负面看法更为强烈。此外,我们使用丰富的员工流动率和工资数据来证明,与对照城市相比,当 Uber 和 Lyft 出现时,奥斯汀的服务人员流动率会增加。我们还进行了几项额外的研究和稳健性检验,这些研究和检验都与我们的假设一致,即 Uber 和 Lyft 通过提高员工流动率降低了奥斯汀餐馆的服务质量。总体而言,这些结果表明零工经济通过劳动力市场对更广泛的行业产生了重大影响。
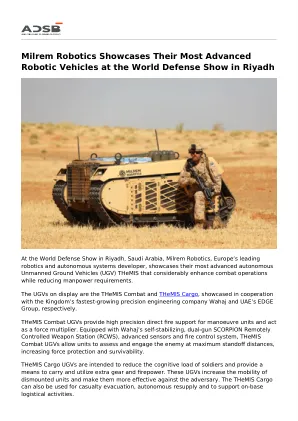
Milrem机器人技术在Riyadh举行的世界防御秀上展示了他们最先进的机器人车
Themis战斗UGV提供了对机动单位的高精度直接支撑,并充当力乘数。配备了Wahaj的自动稳定,双枪蝎子远程控制的武器站(RCWS),高级传感器和控制系统,Themis Combat combat ugvs允许UNITS允许单位在最大的支架距离内评估和吸引敌人,从而提高力量保护和增加。
汽车智能座舱交互设计研究综述 - 包装工程
1 )交互性与安全性的矛盾问题。在当前智能座 舱所处的发展阶段,新型人车交互方式的安全性尚需 要进一步检验,繁复的人机交互会对驾驶人造成分神 影响甚至带来安全隐患;在未来智能座舱发展的第三 阶段,还将面临着人车交互的信任问题。解决该问题 是智能座舱实现实质性发展的关键。 2 )舱内交互与舱外交互的协同问题。智能座舱 作为移动生活智慧终端的“第三空间”,其交互范畴 需全面覆盖汽车舱内及舱外的立体化时空场景,不仅 需要解决舱内的人机交互问题,也要解决舱外的人机 交互问题,以及舱内舱外人机交互的协同问题。现有 研究已部分解答了该问题,但仍需结合真实应用场景 继续深入研究。 3 )智能座舱与其他智慧生活形态的连接问题。 汽车智能座舱是智慧城市的重要组成部分,其交互设 计不是孤立的,需有机对接到整个智慧城市的系统 中。目前,对该问题的研究关注还比较少,有较大的 研究空间。 4 )智能交互的应用实现问题。虽然智能交互的 部分关键技术已实现了突破,但离普遍应用还较远。 其根本原因在于交互技术的发展还不够充分,主要体 现在信息感知、信息传输、信息处理等三个方面,具 体为传感探测仪器的精度不足、高速物联通信基础设 施建设不足、芯片及软件产品的算力不足。这些问题 的解决将决定智能座舱交互设计的发展速度。 综合以上研究现状与问题分析,汽车智能座舱交 互设计的发展趋势总结如下: 1 )交互模态多元化、复合化。基于视觉、听觉、 触觉等多感官通道的立体融合式交互模态将成为主 流,结合更加深入的效率、安全、信任等人机交互研 究,将逐渐发展成为全面的智能交互体系。 2 )交互方式人性化、情感化。虽然交互模态日 益多元化,但座舱人机交互的方式将变得越来越简 单,汽车将自发迎合人的自然交互习惯,让驾驶员以 更少的注意力完成更多的人机交互,从而找到智能座 舱交互性与安全性的平衡点。同时座舱人机交互将更 注重对人的情感需求的感知与响应,成为情感化的智 能伙伴。 3 )交互设计场景化。智能座舱的交互设计将结 合更多的场景催生更丰富的交互方案,不仅从车内场 景扩展到车外场景,也会由单一场景扩展到复合场 景,甚至扩展到智慧生活的任意场景中,并实现交互 模式的订制化,使汽车智能座舱真正成为未来智慧生 活空间的一部分。 4 )交互相关技术日益成熟。在国家政策的持续 引导与驱动下,硬件技术、软件技术、物联通信基础 设施等都将迎来持续的建设、发展与完善,为智能座 舱交互设计的全面发展提供技术基础。

自动运転车による事故とその责任
31 CNBC,“ Uber停止了行人首次死亡后的自动驾驶汽车测试”,3月。19,2018。32 Quartz,“ Uber在其汽车杀死了行人后两个月在亚利桑那州关闭了自动驾驶测试”,2018年5月23日。33 CBS新闻:“ Uber在加利福尼亚失去自动驾驶测试许可证”,3月。2018年2月28日。

四种月球通信延迟条件下月球地形车(LTV)远程遥控操作研究
首字母缩略词 .cvs Excel codex ⁰ 度 < 小于 % 百分比 ABC Artemis 大本营 ACES 学院颜色编码系统 ANOVA 方差分析 CEL 概念探索实验室 cm 厘米 conops 作战概念 deg 度 DEM 数字环境模型 DOUG 动态机载无处不在的图形 DRATS 沙漠研究和技术研究 DSN 深空网络 DTE 直接对地 EDGE 探索图形 EHP 美国宇航局的舱外活动和人类地面机动计划 ESDMD 探索系统发展任务理事会 EVA 舱外活动 F ANOVA F 值 FOD 异物碎片 FOV 视场 fps 每秒帧数 GUNNS 通用节点网络求解器软件 HAB 栖息地 HDR 高数据速率 HITL 人在回路 hh:mm:ss 小时、分钟、秒 IES 照明工程学会 IMU 惯性测量单元 ISRU 现场资源利用单元 JEOD 约翰逊航天中心工程轨道动力学集团 JSC 约翰逊航天中心 kg 千克 km 公里 kph 公里每小时 千瓦 千瓦时 千瓦每小时 激光雷达 光增强探测与测距