XiaoMi-AI文件搜索系统
World File Search System转让

孟加拉国的转让定价(讲义)
ii. 纳税企业所属跨国集团的所有权概况。概况可能包括集团全球组织结构信息,详细说明纳税企业与之有国际交易的集团内企业的名称、位置、法律地位和税收居住国,以及这些企业之间的所有权关系; iii. 集团业务概况,包括业务范围、行业动态、集团经营的市场和经济环境,以及过去、现在和未来的业务模式和战略; iv. 集团每个成员的简要业务概况; v. 集团成员之间的业务关系信息(商品的买卖、服务的提供、资产和无形资产的使用等); vi. 集团的合并财务报表; vii. 纳税企业和在孟加拉国经营的每个关联企业的概况,包括税务和增值税登记号、IRC 和 ERC 编号、地址、活动中心位置等; viii.纳税企业和在孟加拉国经营的每一个关联企业的业务概况,包括业务范围、行业动态、纳税企业所处的市场和经济环境,以及纳税企业过去、现在和未来的商业模式和战略;ix. 纳税人及其关联企业在国际交易中执行的职能、承担的风险以及使用或将要使用的资产的简要说明;x. 纳税企业和在孟加拉国经营的每一个关联企业的财务报表;xi. 纳税企业和在孟加拉国经营的每一个关联企业为整个业务或任何分部或产品线编制的经济和市场分析、预测、预算或任何其他财务估算信息;xii. 与关联企业的所有交易的详情;xiii. 与关联企业交易的合同、条款和协议;xiv. 与关联企业交易的分部财务报表;xv. 选择测试方的方式,包括选择的理由;xvi.可比性情况的详情,包括可比性的筛选方式以及为实现可比性所作的调整;xvii. 可比性分析的详情;xviii. 选择测试方的方式,包括选择的理由;xix. 用于确定公平价格的转让定价方法的信息,包括说明该方法最为合适的理由;xx. 显示确定公平价格/利润的计算和运作的记录,包括对任何假设的解释;

国防部小企业技术转让 (STTR) 计划
小型企业管理局 (SBA) 通过其 SBIR/STTR 政策指令,有意偏离正常的政府招标格式和要求,从而授权机构简化 SBIR/STTR 授予流程并尽量减少小型企业的监管负担。根据 SBA SBIR/STTR 政策指令,国防部 (DoD) 正在以广泛机构公告 (BAA) 的形式征集提案。国防部 SBIR/STTR 计划遵循最新 SBA SBIR/STTR 政策指令的政策和实践。本 BAA 中提出的指导方针结合并利用了 SBA SBIR/STTR 政策指令的灵活性,以鼓励基于科学和技术方法的提案,这些提案最有可能产生对国防部和私营部门重要的结果。SBIR/STTR 政策指令可在此处获得。
加强气候技术转让的网络安全
摘要:气候变化公约与发达国家和发展中国家一道,正在利用现代方法和创新手段采取措施更有效地应对气候变化。然而,技术机制已经启动了一系列举措,旨在探索人工智能在缓解和适应气候变化方面加速和扩大突破性气候解决方案的潜力。为了解决研究问题,本文进行了全面的文献综述,以确定现有的差距并对气候技术转让的法律和网络安全状况建立基础性了解。不同的国家和组织可能采用不同的网络安全措施,这使得确保采取统一和标准化的方法来保护与气候相关的技术变得具有挑战性。这种分散可能导致效率低下、混乱和缺乏互操作性。在环境法和数字安全的交汇处,迫切需要采取全面和适应性的方法,法律框架的演变,网络安全措施的强化,以及技术转让的道德层面,这些都是为气候技术交流的可持续和安全的未来奠定坚实基础的组成部分。

国防部小企业技术转让 (STTR) 计划
小型企业管理局 (SBA) 通过其 SBIR/STTR 政策指令,有意偏离正常的政府招标格式和要求,从而授权机构简化 SBIR/STTR 授予流程并尽量减少小型企业的监管负担。根据 SBA SBIR/STTR 政策指令,国防部 (DoD) 正在以广泛机构公告 (BAA) 的形式征集提案。国防部 SBIR/STTR 计划遵循最新 SBA SBIR/STTR 政策指令的政策和实践。本 BAA 中提出的指导方针结合并利用了 SBA SBIR/STTR 政策指令的灵活性,以鼓励基于科学和技术方法的提案,这些提案最有可能产生对国防部和私营部门重要的结果。SBIR/STTR 政策指令可在此处获得。

国防部小型企业技术转让 (STTR) 计划
本 BAA 纳入了 2022 年 SBIR 和 STTR 延期法案 (Pub.L. 117-183) 所要求的强制性外国披露要求和其他重要计划变更。这些更新可在第 2.2、2.5、3.0、4.2.e.、4.3、6.0、8.2 和附件 2 节中找到。如果提案提交的第 5 卷中未包含本 BAA 的完整填写和签名附件 2(标记为版本 2),则提案将被视为不合规,不会获得评估。必须提供所有小型企业/提案的身份信息以及对表格上每个问题的答复。强烈建议小型企业查看完整的 BAA,以随时了解任何其他近期计划变更。DoD SBIR FY2024.D 年度 BAA 的结构允许参与的 DoD 组件在整个财政年度内宣传 SBIR 主题,而不是三个预定的 BAA 周期。要收到根据此 BAA 发布的 SBIR 机会的通知并接收有关 DoD SBIR 和 STTR 计划的电子邮件更新,强烈建议提出建议的小型企业通过访问 https://www.dodsbirsttr.mil/submissions/login 并单击位于快速链接下的“DSIP Listserv”订阅 DoD SBIR/STTR Listserv。除了本 BAA 中提供的说明外,每个主题发布都将附有组件特定的提案提交说明,其中将详细说明提案内容、格式、结构、预算/持续时间和提案提交截止日期等要求。仅评估针对本 BAA 下的活跃主题提交的提案。活跃主题发布和相关组件特定说明可在以下网址查看:https://www.defensesbirsttr.mil/SBIR-STTR/Opportunities/ 。完整的主题发布索引可在本 BAA 的附录 A 中查看。本 BAA 和国防 SBIR/STTR 创新门户 (DSIP) 网站旨在减少准备正式提案所需的时间和成本。DSIP 是国防部 SBIR/STTR 提案提交的官方门户。提议的小型企业必须通过 DSIP 提交提案;通过任何其他方式提交的提案将不予受理。首次通过此网站提交的提议的小型企业将被要求注册。提出小企业提案的企业必须注册一个 Login.gov 帐户并将其链接到其 DSIP 帐户。有关注册的更多信息,请参阅第 4.14 节。SBIR/STTR 政策指令可在此处获得。小型企业管理局 (SBA) 通过其 SBIR/STTR 政策指令,有意偏离正常的政府招标格式和要求,从而授权机构简化 SBIR/STTR 授予流程并尽量减少小型企业的监管负担。因此,根据 SBA SBIR/STTR 政策指令,国防部正在以广泛机构公告 (BAA) 的形式征集提案。国防部 SBIR/STTR 计划遵循 SBA SBIR/STTR 政策指令(当前版本)的政策和实践。本 BAA 中提出的指导方针结合并利用了 SBA SBIR/STTR 政策指令的灵活性,以鼓励基于最有可能产生对国防部和私营部门重要结果的科学和技术方法的提案。国防部 SBIR 计划不接受机密提案。问题:有关 DSIP 中 DoD SBIR/STTR 流程的一般信息,请参阅 DSIP 客户支持文档。如需有关 DSIP 申请的更多帮助,请访问 DSIP 的学习与支持部分,网址为 https://www.dodsbirsttr.mil/submissions/learning-support/ 。仅向 DSIP 支持发送电子邮件 DoDSBIRSupport@reisystems.com,以获取与 DSIP 申请直接相关的问题的进一步帮助。提交给 DSIP 支持的问题将按照正常工作时间(周一至周五,上午 9:00 至下午 5:00东部时间)收到的顺序进行处理。有关向何处提出有关本 BAA 中的说明和主题的问题的更多信息,请参阅第 4.14 节。

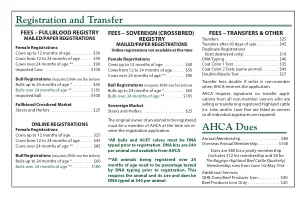
AHCA 会费登记和转让广告费率
费用 – 转让和其他转让 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...
技术转让报告
2022 年 12 月 5 日,LLNL 团队在国家点火装置 (NIF) 向装有部分冻结氢同位素的胶囊的黑腔发射了 192 束激光。结果是聚变点火——产生的聚变能量比传送到 NIF 目标的激光能量还要多。实验向目标传送了 2.05 兆焦耳(百万焦耳或 MJ)的能量,产生了 3.15 MJ 的能量。自 1960 年代物理学家意识到激光可以引发聚变反应,激光惯性约束聚变 (ICF) 可用于商业发电和用于核武器库存管理的研究以来,LLNL 一直致力于点火。自首次点火以来,NIF 又进行了三次成功的发射,扩大了 ICF 和商业化聚变能的可能性。这些成就为 LLNL 在聚变领域取得技术转让成功奠定了基础。
转让与加入 ima 行动
任务分配与加入 IMA 行动 任务分配和加入行动是两个不同的过程,通常可以互换。任务分配行动重新分配空军预备役部队 (ANG、TR、IMA 和 IRR) 内的成员,而加入行动则需要任命或入伍加入获得部队。我们将提供如何确定任务分配与加入行动以及完成每个行动的适当流程。 沟通: - RSOO、DPAR 和 DPAAA:每个办公室在将 MyVector 事件转移/创建到下一个办公室以继续处理时,都会“标记”RIO DET。目标是在通过 ARPC 处理请求时让 RIO DET 了解情况并减少创建的状态查询数量。要“标记”的 POC 将反映在提交处理的 af1288(第二次签注)上。 任务分配行动流程:(RS>>>DET>>>DPAAA)以下被视为任务分配行动:

可制造:以内存为中心和基于负担的任务执行框架可转让移动操纵技能
摘要 - 在以人为本的环境中执行多功能移动操作任务,可以有效地将学习的任务和经验从一个机器人转移到另一个机器人或跨不同环境的能力是关键。在本文中,我们提出了一个多功能的单项和多手册移动操作框架,可促进能力和知识在不同的任务,环境和机器人之间的传递。我们的框架将基于负担的任务描述为以记忆为中心的ARMAR人形机器人机器人家族的认知结构,该架构支持分享经验和演示以进行转移学习。通过代表可承受的移动操作动作,即。例如,机器人与其环境的交互可能性,我们为在各种环境中对已知和未知对象的自动单和多手动操纵提供了一个统一的框架。我们演示了该框架在实际实验中对于多个机器人,任务和环境的适用性。这包括抓住已知和未知的对象,放置对象,双人对象抓握,启用记忆的技能转移在抽屉开放方案中,跨两个不同的人形机器人开放场景,以及从人类演示中学到的倾泻任务。接受后,代码将通过我们的项目第1页发布。