XiaoMi-AI文件搜索系统
World File Search System轮廓线

使用轮廓线或...确定散装材料的体积
注 1—已成立一个工作组来开发数字地形建模 (DTM) 程序的测试方法。它将解决所有已知的数据收集程序,例如常规地面测量、摄影测量、大地定位卫星 (GPS) 等。 1.3 以英寸磅单位或 SI 单位表示的数值应单独视为标准。在文本中,SI 单位显示在括号中。每个系统中表示的数值并不完全等同;因此,每个系统都独立使用。将两个系统中的值组合在一起可能会导致不符合规范。 1.4 本标准并不旨在解决与其使用相关的所有安全问题(如果有)。本标准的用户有责任在使用前建立适当的安全和健康实践并确定监管限制的适用性。
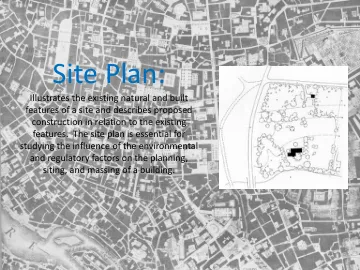
规划和建筑部 - 埃尔多拉多县
显示提出的分级 - 通常使用两种方法之一来完成:深色,较厚的轮廓线叠加(较轻)现有轮廓线;或较厚的线,显示出切割和填充坡度的较厚线(使用刻度绘制斜率)。还指定切割和填充的码数。□提供所提出的结构的饰面高度。□由于建筑计划的这一方面的技术性质,我们建议您拥有设计专业人员(即土木工程师,建筑师或景观建筑师)协助您准备的这一部分。根据几个因素,可能需要土木工程师准备或监督准备计划的准备。

一种从空间立体影像中描绘建筑物足迹的混合方法
从遥感图像中自动提取建筑物轮廓线已用于更新城市地区的地理空间数据库 [1]。高分辨率星载立体 (HRSS) 传感器(例如 GeoEye、WorldView、QuickBird)的发射开启了一个新时代,提供了从太空获取立体图像和 3D 地图的可能性 [2]。事实上,建筑物识别、重建和变化检测已经使用立体图像匹配以及 3D 边缘匹配技术进行 [3,5-6]。如 [3] 所述,基于立体图像的 3D 边缘匹配提供了有希望的结果,但前提是建筑物在数据的空间分辨率方面足够大、具有简单的矩形形状并且与周围物体相比具有良好的辐射对比度。事实上,虽然使用非常高分辨率的航空图像进行 3D 边缘匹配可以详细重建建筑物轮廓线 [7],但使用星载图像,同样的方法可能会遇到问题,特别是在两幅对极图像中都无法清晰检测到建筑物轮廓的情况下。此外,虽然影像匹配提供了代表建筑物高度的DSM,但是从该DSM提取的建筑物大小和形状通常被高估,因此需要辅助信息。
一种从空间立体影像中描绘建筑物足迹的混合方法
从遥感图像中自动提取建筑物轮廓线已用于更新城市地区的地理空间数据库 [1]。高分辨率星载立体 (HRSS) 传感器(例如 GeoEye、WorldView、QuickBird)的发射开启了一个新时代,提供了从太空获取立体图像和 3D 地图的可能性 [2]。事实上,建筑物识别、重建和变化检测已经使用立体图像匹配以及 3D 边缘匹配技术进行 [3,5-6]。如 [3] 所述,基于立体图像的 3D 边缘匹配提供了有希望的结果,但前提是建筑物在数据的空间分辨率方面足够大、具有简单的矩形形状并且与周围物体相比具有良好的辐射对比度。事实上,虽然使用非常高分辨率的航空图像进行 3D 边缘匹配可以详细重建建筑物轮廓线 [7],但使用星载图像,同样的方法可能会遇到问题,特别是在两幅对极图像中都无法清晰检测到建筑物轮廓的情况下。此外,虽然影像匹配提供了代表建筑物高度的DSM,但是从该DSM提取的建筑物大小和形状通常被高估,因此需要辅助信息。
一种从空间立体影像中描绘建筑物足迹的混合方法
从遥感图像中自动提取建筑物轮廓线已用于更新城市地区的地理空间数据库 [1]。高分辨率星载立体 (HRSS) 传感器(例如 GeoEye、WorldView、QuickBird)的发射开启了一个新时代,提供了从太空获取立体图像和 3D 地图的可能性 [2]。事实上,建筑物识别、重建和变化检测已经使用立体图像匹配以及 3D 边缘匹配技术进行 [3,5-6]。如 [3] 所述,基于立体图像的 3D 边缘匹配提供了有希望的结果,但前提是建筑物在数据的空间分辨率方面足够大、具有简单的矩形形状并且与周围物体相比具有良好的辐射对比度。事实上,虽然使用非常高分辨率的航空图像进行 3D 边缘匹配可以详细重建建筑物轮廓线 [7],但使用星载图像,同样的方法可能会遇到问题,特别是在两幅对极图像中都无法清晰检测到建筑物轮廓的情况下。此外,虽然影像匹配提供了代表建筑物高度的DSM,但是从该DSM提取的建筑物大小和形状通常被高估,因此需要辅助信息。
一种从空间立体影像中描绘建筑物足迹的混合方法
从遥感图像中自动提取建筑物轮廓线已用于更新城市地区的地理空间数据库 [1]。高分辨率星载立体 (HRSS) 传感器(例如 GeoEye、WorldView、QuickBird)的发射开启了一个新时代,提供了从太空获取立体图像和 3D 地图的可能性 [2]。事实上,建筑物识别、重建和变化检测已经使用立体图像匹配以及 3D 边缘匹配技术进行 [3,5-6]。如 [3] 所述,基于立体图像的 3D 边缘匹配提供了有希望的结果,但前提是建筑物在数据的空间分辨率方面足够大、具有简单的矩形形状并且与周围物体相比具有良好的辐射对比度。事实上,虽然使用非常高分辨率的航空图像进行 3D 边缘匹配可以详细重建建筑物轮廓线 [7],但使用星载图像,同样的方法可能会遇到问题,特别是在两幅对极图像中都无法清晰检测到建筑物轮廓的情况下。此外,虽然影像匹配提供了代表建筑物高度的DSM,但是从该DSM提取的建筑物大小和形状通常被高估,因此需要辅助信息。

用于评估缓解效果的 CFD 模型
泄漏发生后 540 秒,2.5% LFL、5% LFL 和 10% LFL 处的云轮廓线,针对三种情况 a) 水平泄漏指向北墙,b) 水平泄漏指向东墙,c) 垂直泄漏指向天花板。包括探测器位置(x= 4.1 m、y = 1.7 m 和 z = 2.2 m)处的摩尔分数和相应的 LFL 值。提供。

Molikpaq 和 Piltun 之间的声学研究结果...
1 1997 年至 2001 年的空中调查表明,灰鲸在无冰季节大部分时间都在萨哈林岛东北海岸附近觅食。它们主要位于 20 米水深轮廓线的近岸,从皮尔屯湾口到萨哈林岛东北海岸以北的区域。2001 年,在空中和船上调查中,在 Arktun-Dagi 许可区以南 30-45 米深的水域中发现了第二个觅食区。

揭示了固定结构的基本碱性 - 黑骨...
图3:通过独立分子的平均平面(〜(10 1 1̅))生成的傅立叶电势(F obs)图支持成功鉴定黄氨酸分子内的氢原子位置,从而确认存在7小时的互变素体。f obs是指观察到的结构因子。轮廓代表通过两个独立分子采集的平均平面计算出的电子电位。分子与平均平面有些偏差。因此,某些原子在轮廓上显示在“下方”。仅显示正电子电位。轮廓线之间的步骤代表电子电位的5%步骤。原子颜色如下:氮(蓝色),氧(红色),碳(灰色)和氢(白色)。使用ololex2生成。