XiaoMi-AI文件搜索系统
World File Search System连续旋转


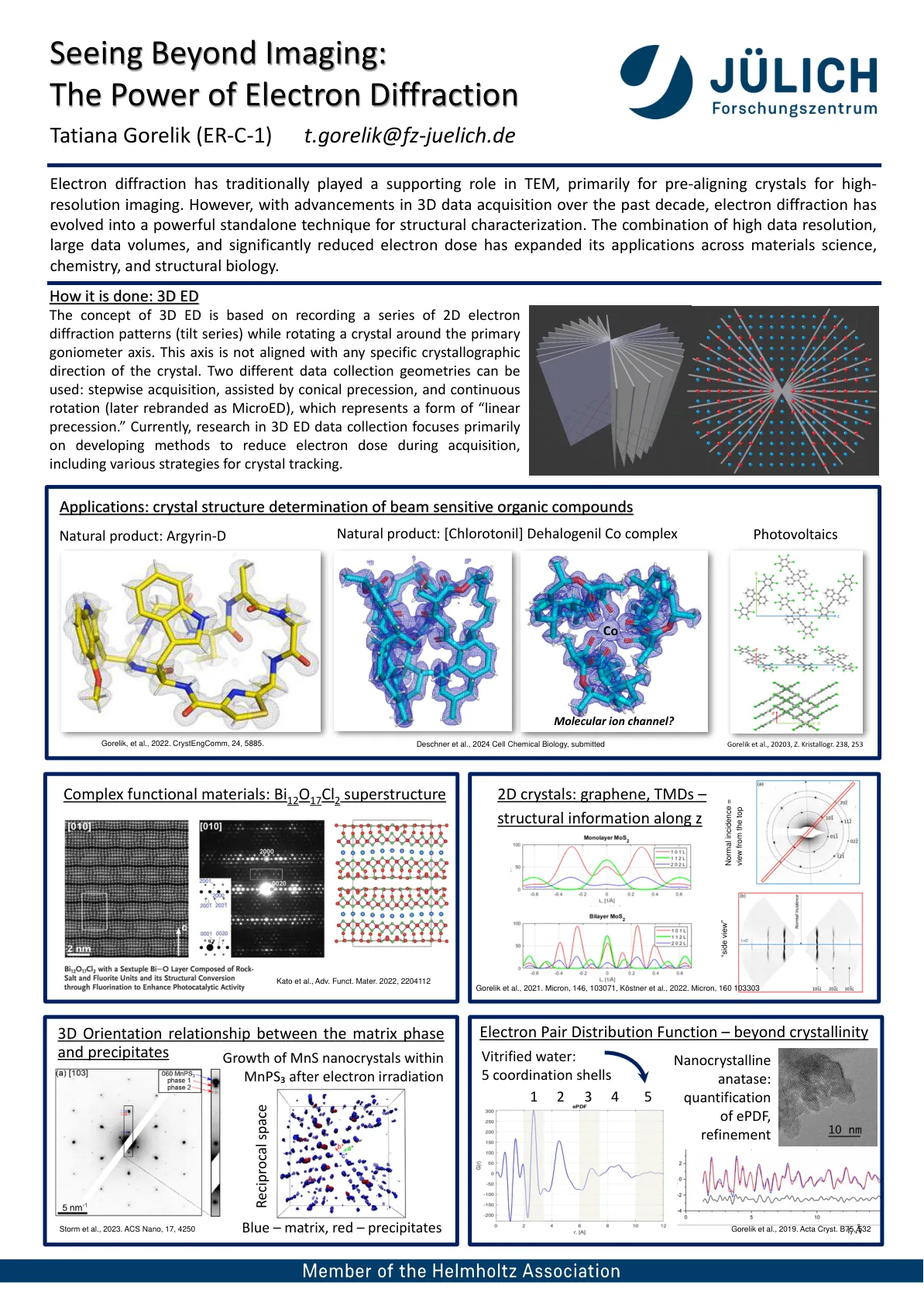
tatiana gorelik(er-c-1)t.gorelik@fz-juelich.de
3D ED的概念基于记录一系列2D电子衍射模式(倾斜序列),同时在围绕初级角度计轴旋转晶体。该轴未与晶体的任何特定晶体学方向对齐。可以使用两种不同的数据收集几何形状:逐步采集,在锥形进动和连续旋转(后来重新命名为微型)中,这代表了一种“线性进动”的形式。当前,3D ED数据收集的研究主要侧重于开发在获取过程中减少电子剂量的方法,包括各种晶体跟踪策略。
Bioruptor®PICO手册
div>的生物爆pico使用一种温和的超声处理方法来保留DNA和/或生物复合物的完整性,包括染色质,蛋白质 - 蛋白质结合,蛋白质DNA复合物以及其他生化和生物学测定系统。Bioruptor Pico Sonication系统使用超声浴场来产生间接超声波,从而从水箱下方的超声元件中散发出来。由于该系统比其他超声波器更温和,因此Bioruptor Pico产生的结果比更严格的超声处理方法更好,更一致。最多可以平行地对16个闭合试管进行超声检查,并且试管的连续旋转甚至可以分布能量以进行有效的超声处理。Bioruptor Pico可以自动化超声处理,从而确保了更高的结果可重复性。

航天器分类与太空探索
1. 飞掠航天器 2. 轨道器 3. 大气航天器 4. 着陆器 5. 探测车 6. 穿透器 7. 天文台航天器 8. 通信航天器 我们分别阐述这八个类别。 (另请参阅JPL公共网站,其中列出了过去、现在、未来和拟议的JPL机器人航天器任务的最新列表) 1.飞掠航天器 飞掠航天器进行太阳系探索的初始侦察阶段。它们沿着连续的太阳轨道或逃逸轨迹运行,永远不会被进入行星轨道。它们必须能够使用其仪器观察经过的目标。理想情况下,它们可以平移以补偿目标在光学仪器视野内的视运动。它们必须将数据下行链路到地球,并在其天线偏离地球点期间将数据存储在机上。它们必须能够承受长时间的行星际巡航。飞越航天器可能设计为使用推进器或反作用轮在 3 个轴上稳定,或连续旋转以保持稳定。飞越航天器类别的主要示例是旅行者 2 号,它与木星、土星、天王星和海王星系统进行了接触。飞越航天器的其他示例包括:
![arXiv:2207.10770v1 [quant-ph] 2022 年 7 月 21 日](/simg/6\6ab36c79c785bee67ff787c84b500730a8291ac0.webp)
arXiv:2207.10770v1 [quant-ph] 2022 年 7 月 21 日
和科学领域的任何其他进步一样,量子计算的概念也是应运而生的。经典计算不足以模拟复杂的量子系统,主要是因为将量子系统的状态存储为经典信息所需的内存会随着系统规模的扩大而呈指数增长。为了更好地模拟这类系统,Richard Feynman 提出了使用量子计算机,即使用量子系统存储和处理数据的计算机 [1, 2]。不久之后,人们注意到了使用这种信息处理方法的其他优势。首先,使用一些专门设计的问题展示了量子计算相对于经典计算的优越性 [3–6]。然后 Shor 证明了使用量子计算机在多项式时间内解决古老的因式分解问题的可能性 [7]。几年后,Grover 表明另一个经典问题,即搜索问题,可以使用量子算法在更短的时间内解决 [8, 9]。搜索问题是在无序集合内查找满足某些条件的元素的问题。经典方法是尝试集合中的每个元素,直到找到解决方案。 Grover 算法通过对某个初始量子态进行连续旋转,直到将其转换为所需状态。初始状态是集合中所有元素以相等系数的叠加,而所需的最终状态则是仅有解的叠加。 Grover 算法无法在多项式时间内解决搜索问题,但它大大减少了所需的试验次数。在单个解的情况下(这是我们在本文中研究的唯一情况),搜索一组 N 个元素经典地需要 O ( N ) 次试验。 Grover 算法仅用 O ( √

路径积分基态复制方法用于计算偶性线性转子纠缠熵的方法
我们计算了在其基态相互作用的线性转子系统的第二个rényi纠缠熵,以衡量连续旋转自由度的纠缠。熵是根据两分量子系统中子系统的纯度而定义的,并且为了计算它,我们比较了基于路径积分基态(PIGS)形式的两个采样集合。该方案以复制技巧为中心,并由Hastings等人在这种情况下开发的比率技巧。[物理。修订版Lett。 104,157201(2010)]。 我们研究了一个由一维的晶格上的线性量子转子组成的系统,通过各向异性偶极 - 偶极电位相互作用。 猪估计的基态第二rényi熵是针对来自密度基质重质化组的基于各种相互作用强度和系统尺寸的基准测试的。 我们发现,熵的增长会增加相互作用强度,对于足够大的系统,它似乎在原木附近平稳(2)。 我们认为,许多强烈相互作用的转子的限制情况类似于在猫状态下的两级粒子的晶格,其中人们自然会发现log(2)的纠缠熵。Lett。104,157201(2010)]。我们研究了一个由一维的晶格上的线性量子转子组成的系统,通过各向异性偶极 - 偶极电位相互作用。猪估计的基态第二rényi熵是针对来自密度基质重质化组的基于各种相互作用强度和系统尺寸的基准测试的。我们发现,熵的增长会增加相互作用强度,对于足够大的系统,它似乎在原木附近平稳(2)。我们认为,许多强烈相互作用的转子的限制情况类似于在猫状态下的两级粒子的晶格,其中人们自然会发现log(2)的纠缠熵。
关于激光调节器(FAQ)的常见问题
a)强度调节器(P) - 调节强度(功率P),分别针对偏光激光的振幅。强度调节器(P)将强度各自将激光光振幅变化。强度调制器是一种通用激光调节器,其中包括输出偏振器。b)相调节器(PHAS) - 调节偏光激光的相位。相调节器(PHAS)改变了线性极化激光的相。这意味着如果施加电压,则穿过相调节器的线性极化光将较慢(如果施加半波电压,则半波或半个周期)。c)通用调节器 - 调节极化激光或调节激光相的极化状态。通用调制器可以在三种不同的操作模式中使用:1)通用调制器正在改变线性偏振光的极化状态,从保持线性(不施加电压)到圆形(将四分之一波电压应用于线性)到线性,但旋转90°(施加了半波电压)。如果客户在激光调节器输出之后添加自己的偏振器,则此集合(通用激光调节器 +偏振器)正在改变激光灯的强度,因此它充当强度调节器。2)如果将四分之一波板放置在通用调节器的输出处,则可以根据施加的电压连续旋转线性极化光的极化平面。3)通用调制器还可以改变线性极化激光的相位,如果用于不同方向,请参阅LM13和LM0202激光调节器手册。可以将通用调制器用于极化和相位调制,但是使用通用调制器的相位调制需要与纯相调节器相比,如果通用调制器用作极化调制器,则分别比较了纯相调制器。

不同运动学对 JIZAI 镍钛旋转器械静态和动态扭转行为的影响:体外研究
背景/目的:使用传统方法检查镍钛旋转器械的静态扭矩与临床情况相矛盾,而且该方法对于顺时针和逆时针旋转运动的有效性值得怀疑。本研究旨在使用临床扭矩极限设置在静态/动态测试条件下检查不同运动学对 JIZAI 器械 (#25/.04) 扭转行为的影响。材料和方法:在静态测试中,将 JIZAI 的 5 毫米尖端固定在圆柱形虎钳中,并以自动扭矩反转、最佳扭矩反转 (OTR) 或往复 (REC) 进行连续旋转 (CR) 直至断裂(各 n Z 10)。在动态测试中,使用单长度技术使用 JIZAI 和 CR、OTR 或 REC 对直根管和严重弯曲根管进行器械治疗(各 n Z 10)。使用带有扭矩/力测量单元的自动塑形装置记录断裂时的静态扭矩、断裂时间 (T f )、动态扭矩和旋入力。使用单因素方差分析或带有 Bonferroni 校正的 Kruskal e Wallis 检验和 Mann e Whitney U 检验进行统计学分析 (⍺ Z 0.05)。结果:运动学不影响静态或动态扭矩 (P > 0.05);然而,确实影响直根管中的旋入力 (P < 0.05)。REC 具有明显较长的 T f ,而严重弯曲的根管在 CR 中产生明显更大的扭矩和旋入力 (P < 0.05)。结论:在目前的实验条件下,扭矩以外的参数对不同的运动学表现出明显的影响。 OTR 的动态扭矩和旋入力与其他旋转模式相似,不受管道弯曲度的影响。