XiaoMi-AI文件搜索系统
World File Search System迪维肖

FOX THREE N°9 - 阵风:全能战斗机
2006 年第 12F 舰队防空周共有 3 个部队共 8 架飞机部署到朗迪维肖: - 两架来自旺代省第 1/5 狩猎中队的法国空军幻影 2000C - 四架属于 349 战斗机中队的比利时 F-16 MLU - 两架来自 849 海军航空中队的英国皇家海军海王 ASaC Mk 7。此外,第 11F 和第 17F 舰队的超军旗战斗机每天参加演习,第 4F 舰队的 E-2C 鹰眼战斗机和法国空军的 E-3F 预警机也积极参与其中。« 第 12F 舰队防空周旨在让机组人员熟悉先进防空战术的使用,» Jérôme Puech 解释道。我们知道我们可以在朗迪维肖接待相当数量的飞机。这就是为什么我们邀请了相当多的法国和外国部队:法国幻影 2000、西班牙和瑞士的 F/A-18、比利时、意大利、荷兰

CW5 特拉维斯·迪克森 - 美国陆军
此前,他曾在罗马尼亚的 1-214 航空团担任高级准尉顾问、营维护官、生产控制官、航空维护官和前线航空维护官。CW5 Dixon 是伊拉克 TAFT 第 8 队的教练飞行员和航空维护官。此前,他曾担任佐治亚州本宁堡“先锋营”2-29 步兵团质量控制主管,以及 UH-60 飞行员、UH-60 飞行员指挥官和德国 3-158 航空团航空维护官,并被部署到伊拉克和阿富汗。他的第一项任务是埃及西奈特遣部队的 UH-1 飞行员指挥官。
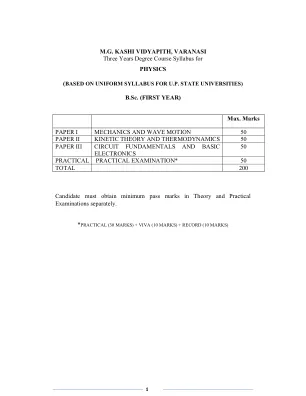
瓦拉纳西的喀什维迪亚皮特
试卷 I - 力学与波动 第一单元 惯性参考系、牛顿运动定律、直线和圆周运动中粒子的动力学、保守力和非保守力、能量守恒、线性动量和角动量、一维和二维碰撞、横截面。 第二单元 简单物体的转动能量和转动惯量、刚体在水平和倾斜平面上的平动、转动和运动的综合、陀螺运动的简单处理。弹性常数之间的关系、梁的弯曲和圆柱体的扭转。 第三单元 中心力、两粒子中心力问题、减小质量、相对和质心运动、万有引力定律、开普勒定律、行星和卫星的运动、地球静止卫星。 第四单元 简谐运动、SHM 的微分方程及其解、复数符号的使用、阻尼和强迫振动、简谐运动的合成。波动的微分方程、流体介质中的平面行进波、波的反射、反射时的相变、叠加、驻波、压力和能量分布、相速度和群速度。
2024 NAATSIHWP全国会议
他以前曾在悉尼歌剧院和墨尔本喜剧节上演出,他的一位男子表演我的土地,这是他的生活经历,作为一个原住民成长,并为融合他作为舞者和迪迪格球员的技能提供了完美的机会。来自汤斯维尔(Townsville)的肖恩(Sean)在舞者中拥有既定的职业生涯,他创建了Ngaru舞蹈公司,并与Bangarra舞蹈公司一起在世界各地演出,包括受邀请达赖喇嘛,黑尔(Hale)和佩斯(Hale&Pace)和查尔斯王子(Prince Charles)的邀请。但是,如今,肖恩(Sean)作为MC和喜剧演员的官方活动,企业活动,戏剧表演,喜剧俱乐部,研讨会,开幕式和节日的需求一直在需求。

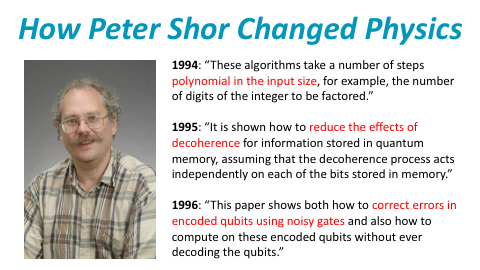
彼得·肖尔如何改变物理学
这些物体 [量子自动机] 可能向我们展示具有极不寻常特征的确定性过程的数学模型。其中一个原因是量子相空间比经典空间大得多:经典空间有 N 个离散级,允许它们叠加的量子系统将有 c N 个普朗克单元。在两个经典系统的联合中,它们的大小 N 1 和 N 2 相乘,但在量子情况下,我们有 c N1+N2 。


语义增强图像-文本预训练模型的零样本三维模型分类
Cheraghian 等人 [ 21 – 23 ] 在零样本 3 维模型分类方 面提出了 3 维点云的零样本学习方法、缓解 3 维零样 本学习中枢纽点问题的方法和基于直推式零样本学 习的 3 维点云分类方法,并将它们封装进一个全新 的零样本 3 维点云方法 [ 24 ] 中。以上方法均是利用已 知类样本的点云表征及其词向量对未知类别进行分 类,开创了零样本 3 维模型分类方法。近年来, CLIP 在零样本图像分类上取得了良好的效果,因此有研 究者将 CLIP 应用到零样本 3 维模型分类方法中, Zhang 等人 [ 25 ] 提出了基于 CLIP 的 3 维点云理解 (Point cloud understanding by CLIP, PointCLIP) 模型, PointCLIP 首先将 3 维点云投影成多个深度图,然 后利用 CLIP 的预训练图像编码器提取深度图特 征,同时将类别名称通过 CLIP 预先训练的文本编 码器提取文本特征。但是 PointCLIP 的性能受到深 度图和图像之间的域差异以及深度分布的多样性限 制。为了解决这一问题,基于图像 - 深度图预训练 CLIP 的点云分类方法 (transfer CLIP to Point cloud classification with image-depth pre-training, CLIP2Point) [ 26 ] 将跨模态学习与模态内学习相结合 训练了一个深度图编码器。在分类时,冻结 CLIP 的图像编码器,使用深度图编码器提取深度图特 征,该方法缓解了深度图和图像间的模型差异。用 于 3 维理解的图像 - 文本 - 点云一致性表征学习方法 (learning Unified representation of Language, Im- age and Point cloud for 3D understanding, ULIP) [ 27 ] 构建了一个图像、文本和点云 3 种模态的 统一嵌入空间,该方法利用大规模图像 - 文本对预 训练的视觉语言模型,并将 3 维点云编码器的特征 空间与预先对齐的视觉 - 文本特征空间对齐,大幅 提高了 3 维模型的识别能力。与之相似的是,基于 提示文本微调的 3 维识别方法 (CLIP Goes 3D, CG3D) [ 28 ] 同样使用 3 元组形式确保同一类别的 3 维模 型特征和图像特征之间以及 3 维模型特征和文本特 征之间存在相似性,从而使点云编码器获得零样本 识别的能力。另外, PointCLIP V2 [ 29 ] 在 Point- CLIP 的基础之上,通过利用更先进的投影算法和 更详细的 3 维模型描述,显着提高了零样本 3 维模型 分类准确率。本文采用语义增强 CLIP 解决图像和文 本的语义鸿沟问题,通过在语义层面为图像和文本 提供更多相似的语义信息,使图像和文本对齐更具有 一致性,从而有效提高 3 维模型的零样本分类性能。 2.2 提示工程

肖恩·布朗上校 副主任
肖恩·M·布朗上校于 1999 年被任命为装甲军官;他在各种陆军基地及其周边长大,但将密苏里州圣路易斯称为自己的家。布朗上校毕业于密苏里大学哥伦比亚分校,获得心理学文学士学位。他的其他学位包括爱尔兰国立大学梅努斯分校的领导力、管理和国防研究硕士学位以及陆军战争学院的战略研究硕士学位。