XiaoMi-AI文件搜索系统
World File Search System通过点
欧洲经济领域的二氧化碳捕获,运输和存储的主要当前法律和监管框架
二氧化碳(CO 2)捕获,运输和存储(CCT)系统的关键作用将在缓解气候变化方面发挥作用,要么通过将CO 2从大气中删除并永久性地存储并避免通过点源产生的CO 2排放,尤其是从难以实现的septors(例如,从难以实现的阶层)运输(例如,驱动器)(例如,浪费)(例如,浪费)(例如,浪费)。尽管CCT准备从技术角度实施,但可以进一步改善其实施和法规所需的法律和监管框架。在本文中,我们总结并批判性地讨论了《东北大西洋海洋环境公约》的规定(“ OSPAR公约”),伦敦协议以及欧洲CCS和ETS指令的规定。侧重于欧洲经济区,我们重点介绍了CCT的大规模部署,应应对现有的差距和障碍。此外,随着CO 2运输和地质存储的法律格局正在迅速发展,我们概述了近期澄清现有立法方面的澄清以及欧洲委员会在该领域提出的新建议的摘要。
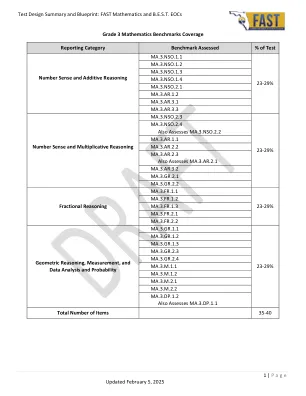
测试设计摘要和蓝图:FAST Mathematics 和 BEST EOC
o 编辑任务选项 — 学生单击下拉菜单,其中包含完成方程式或表达式、语句或其他组件的选项。然后,学生从下拉菜单中选择正确的答案。对于纸质作业,此项目类型已修改;学生填写气泡以表示选择。 o 可选热文本 — 指示学生从多个选项中单击一个或多个正确答案。当学生将鼠标悬停在选项(例如短语、句子、数字或表达式)上时,文本将突出显示。这表明文本是可选的(“热”)。选项可以以各种方式呈现(例如,作为列表、嵌入文本或表格)。然后,学生可以单击一个选项来选择它。对于纸质作业,此项目类型已修改;学生填写气泡以表示选择。 o 多选 — 指示学生从多个选项中选择所有正确答案。这些项目不同于多项选择题,后者只允许学生选择一个正确答案。这些项目出现在在线评估和纸质评估中。 o 图形响应项目显示 (GRID) — 学生使用点、线或箭头工具在图形上创建响应。项目类型还可能要求学生选择数字、单词、短语或图像,并使用拖放功能将它们放入图形中。对于纸质评估,此项目类型将被另一种项目类型取代。 o 公式编辑器 — 学生根据测试项目在响应框中输入数字、变量、表达式或公式。向学生展示一个工具栏,其中包含可用于创建响应的各种数学符号。响应框可以与项目的文本分开,也可以嵌入在项目的文本中(例如,与句子对齐或嵌入在表格中)。对于纸质评估,此项目类型已修改;学生在响应框中写下响应。 o 匹配项目 — 学生勾选一个框以指示列标题中的信息是否与行中的信息匹配。每行或每列的正确答案选项数量可能有所不同。这些项目出现在在线评估和纸质评估中。o 分数模型项目——学生创建分数模型。该项目类型要么为学生提供已分成相等部分的模型,要么允许学生通过选择相等部分的数量来构建模型。如果学生构建模型,该项目可能要求学生单击 + 和 - 按钮以选择整体的数量和/或每个整体中的部分数量。然后,学生选择要着色的部分数量。对于纸质评估,此项目类型将被另一种项目类型替换。o 图形项目——学生创建图形或数字线。学生可以通过点击显示的部分内容来创建条形图、线图或直方图。学生可以通过点击网格或坐标网格来绘制点、创建方程式图形、绘制形状或构建其他响应。学生可以通过点击数轴来在数轴上绘制点,或者通过点击数轴并选择箭头来绘制不等式。对于纸质作业,此项目类型将被其他项目类型取代。
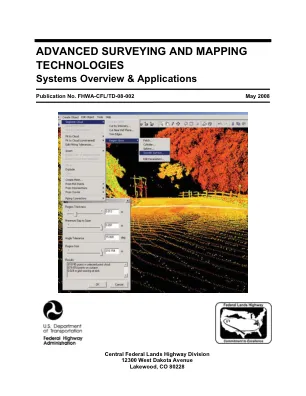
先进的测绘技术
本研究于 2002 年和 2003 年进行,旨在评估先进测绘技术对联邦公路管理局联邦土地公路部门典型任务的适用性。地面激光扫描系统已被确定为一种可用于测绘任务的新兴技术。该研究包括在加利福尼亚州里弗赛德现有项目现场对激光扫描方法进行现场演示。陡峭的地形和茂密的灌木丛导致能见度受限,无法成功对许多目标位置进行地形测绘。地面激光扫描在那些能见度和访问不太复杂且可以利用点云数据提供的丰富细节和准确性的有限应用中具有优势。可能的示例应用可能是历史资源的记录或结构的详细测绘。机载光探测和测距 (LiDAR) 与地面激光扫描类似,但其向下看的视角和快速的线性覆盖更适用于路线测量。 LiDAR 任务可提供大量数据点,通过点云数据实现可视化和虚拟地形测绘。机载 LiDAR 还发现,在茂密的植被中,可见度有限,因此森林茂密的地区和浓密的灌木丛并不是最佳应用。还必须考虑
对点云城市环境分割和 3D 建模的贡献
前言 本论文总结了我来到斯特拉斯堡国立应用科学学院以来二十年的研究成果。它由两部分组成:第一部分概述了我在每个研究领域所取得的进展;第二部分总结了我过去和现在的教学、研究和行政活动。我的研究重点是通过点云对城市物体进行 3D 建模的特定主题。通过评估根据遗产地获取的数据开发的算法的质量,我们希望为公众相对较少了解的地形专业的推广做出贡献,同时突出建筑、城市和景观遗产我们的领土。论文的第一部分以某种方式强调了地形在从点云到 3D 模型的路径上的重要性。为这项工作做出贡献的众多研究结束项目证明,我们的研究与我们内部提供的培训自然相关,同时丰富了仪器和方法、激光测量、摄影测量、网络补偿、启动研究或甚至产生新的流程,例如最近启动的 BIM(建筑信息模型)流程。回忆录的第二部分见证了这一点。最后,我贡献的多学科主题让我有机会与来自不同专业的专家合作,除了地形学领域的专家,例如考古学、建筑学、地理学、气候学、法律、土木工程、传播学、力学、数学、计算机科学、历史,而且这个列表只会不断增长。围绕这些职业的多样性及其具体问题激发了我的求知欲,并自然地丰富了我的研究,但在所有这些经历中,我首先会记住他们将引起的宝贵的人类遭遇。

dpcrypto:使用GPUS上的点产生指令
摘要。DOT-PRODUCT是许多机器学习和科学计算算法中广泛使用的操作。最近,NVIDIA在现代GPU架构中引入了DOT-产品指令(DP2A和DP4A),目的是加速机器学习和科学计算应用程序。这些点 - 产品指令允许在时钟周期中计算多和添加指令,与常规的32位整数单元相比,有效地实现了更高的吞吐量。在本文中,我们表明DOT-产品指令也可以用于加速基质 - 型质子和多项式卷积操作,这些操作通常在基于量子后晶格后的密码学方案中发现。特别是我们提出了高度优化的Frodokem实现,其中矩阵 - 倍数通过点 - 产品指令加速。我们还提出了专门设计的数据结构,该结构允许使用DOT-产品指令来加速多项式卷积,从而有效地实现了Saber钥匙封装机制。拟议的Frodokem实施实现了4。每秒密钥交换操作比V100 GPU上的最先进的实施情况更高。本文还介绍了在GPU平台上的第一次实施,分别在RTX3080,V100和T4 GPU上实现了124,418、120,463和31,658密钥交换操作。由于基矩阵 - 多项式卷积操作是基于晶格的加密方案中最耗时的操作,因此我们提出的技术很可能有助于其他类似的算法。在各种GPU平台上提出的KEM的高吞吐量实现允许从服务器中填充重型计算(KEMS)。这对于许多新兴应用程序(如物联网和云计算)非常有用。

在弱半监督的3D对象检测
训练高准确的3D检测器需要使用7个自由度的大规模3D注释,这是既易于且耗时的。因此,提出了点符号的形式,为3D检测中的实践应用提供了重要的前景,这不仅更容易且价格便宜,而且为对象定位提供了强大的空间信息。在本文中,我们从经验中发现,仅适应其3D形式并非遇到两个主要的瓶颈是不算气的:1)它未能在模型中编码强3D,而2)它由于极端的Spars sparsity而产生了低质量的pseudo pseudo Labels。为了克服这些挑战,我们引入了Point-Detr3D,这是一个弱小的半监督3D检测的教师学生框架,旨在在限制的实例注释预算中充分利用点的监督。与点 - dive不同,该点仅通过点编码器编码3D位置信息,我们提出了一个显式的位置查询初始化策略,以增强先验性。考虑到教师模型产生的遥远区域的伪标签质量低时,我们通过通过新型的跨模式可变形ROI融合(D-ROI)结合了密集的图像数据来增强探测器的感知。此外,提出了一种创新的点指导的自我监督学习技术,即使在学生模型中,也可以完全利用点的先验。与代表性的Nuscenes数据集进行了广泛的实验,证明了我们的观点 - DETR3D与前所未有的作品相比获得了显着改善。值得注意的是,只有5%的标记数据,Point-detr3d的完全超级可见的对应物的性能超过90%。
埃塞俄比亚的绝对位势高度系统 - ERA
1.1.用极坐标在球体上定义的球冠(虚线圆)(ρ 是相当于 ψ 的径向距离(弦长))............................................................................. 2 1.2.显示计算重力势能数的方案的流程图............................................................. 11 1.3.空中自由空气重力扰动(mgal)插值到规则的二维水平坐标网格上,但飞行高度不规则............................................................. 16 1.4.埃塞俄比亚航空重力测量的测量点分布。重力扰动(mgal)............................................................................................. 17 2.1.质量线元素的几何形状及其相对于半径矢量 R 的重力吸引力。............................................................................................................. 39 2.2.垂直线质量元素相对于质量元素法向重力方向的垂直和水平重力分量 ...................................................................................................................... 41 2.3.通过点质量的垂直阵列近似垂直线质量元素 ...................................................................................................................................... 44 2.4.用于近似垂直棱柱的圆柱扇区的几何形状.................................................................................................... 47 2.5.将垂直线质量元素和多点的重力和潜在模型的精度与从圆柱扇区导出的相应模型进行比较,作为水平距离的函数。(a) 重力差异(mGal)。(b) 重力差异(mgal)。(b) 电位差 ) ( 2 2 − s m ......................................................... 52 2.6a-c.在源质量附近计算的垂直线质量元素、多点和扇区的重力和重力势能比较 – 在可变海拔和恒定水平距离 90 m。 (a) 重力 (mgal)。(c) 电位差 ) ( 2 2 − s m ......................... 54 2.7a-b.由于测试质量对较长距离重力和电位的影响,比较垂直线质量元素相对于多点的精度。(a) 重力差异 (b) 电位差异。........................ 56 2.8.计算地形质量对重力和电位影响所需的垂直线质量元素、多点和扇区的计算速度比较势。百分比与多点计算速度有关。................................................................................................................................... 58 2.9a-b。从代表埃塞俄比亚及其周边地区的 SRTM 数据中评估航空重力测量点的现场地形重力和势,使用多点表示半径 1 公里内的内区,使用刺猬表示半径更大的区域。(a) 重力(mgal)。(b) 势 ) ( 2 2 − s m ............. 59 2.10。消除地形引力影响后,从航空重力扰动得出的埃塞俄比亚布格扰动图(mgal)........... 60 2.11。根据代表埃塞俄比亚及其周边地区的 SRTM 数据的航空重力观测计算得出的压缩地形重力模型(截至 2159 年 = n 的系列完整数据)............................................................. 64

物理模型与深度的混合重建...
1. Li, D. 等人。扩展分辨率结构化照明成像的内吞和细胞骨架动力学。91 Science 349 , 944–944 (2015)。92 2. Gustafsson, MGL 使用结构化照明显微镜将横向分辨率极限提高两倍。Journal of Microscopy 198 , 82-87 (2000)。94 3. Gustafsson, MGL 等人。通过结构化照明在宽视场荧光显微镜中实现三维分辨率加倍。Biophysical Journal 94 , 4957-4970 (2008)。96 4. Cragg, GE 和 So, PTC 使用驻波增强横向分辨率。Opt. Lett. 97 25 , 46-48 (2000)。 98 5. Kner, P. 等人。通过结构化照明对活细胞进行超分辨率视频显微镜检查。自然方法 6 , 99 339–342 (2009)。00 6. Hirvonen, LM 等人。活细胞的结构化照明显微镜检查。欧洲生物物理杂志 38 , 807–812 01 (2009)。02 7. Guo, Y. 等人。在毫秒时间尺度上以纳米级分辨率可视化细胞内细胞器和细胞骨架相互作用。Cell 175 , 1430-1442 (2018)。04 8. Huang, X. 等人。使用 Hessian 结构化照明显微镜实现快速、长期、超分辨率成像。自然生物技术 36 , 451–459 (2018)。 06 9. Chu, K. 等人。低信号水平结构照明显微镜的图像重建。Opt. 07 Express 22 , 8687-8702 (2014)。08 10. Wen, G. 等人。通过点扩展函数工程实现高保真结构照明显微镜。09 Light Sci Appl 10 , 70 (2021)。10 11. Jin, L. 等人。深度学习使结构照明显微镜具有低光照水平和更快的速度。Nat Commun 11 , 1934 (2020)。12 12. Qiao, C. 等人。用于光学显微镜图像超分辨率的深度神经网络的评估和开发。Nat Methods 18 , 194–202 (2021)。 14 13. Kobler, E. 等人。线性逆问题的总深度变分。CVPR,7546-7555(2020 年)。15 14. S. Bhadra。等人。断层扫描图像重建中的幻觉。IEEE 医学成像学报 40,3249-3260(2021 年)。17 15. Jakobs, S. 和 Wurm, CA 线粒体的超分辨率显微镜。化学生物学最新观点 20,9-15(2014 年)。19