XiaoMi-AI文件搜索系统
World File Search System遥控的
引用:Chandramenon,P和Aggoun,A和Tchuenbou-Magaia,F(2024)Aquapon-ICS 4.0的智能方法,重点是水质综合
与不断增长的食物需求以及农业对人为全球变暖的重大贡献相关的世界人口的快速增长正在推动从传统农业方法到创新和可持续的农业的变化。这些方法之一是水产养殖,它是建立在循环经济原则的基础上,该原则将共生培养物与水培养基与水培养基与水产培养废物结合起来,是植物生长的营养。传统的水培技术已通过完全自动化和遥控的系统发展为Aquaponics 4.0,用于以工业规模生产食品。实施物联网(IoT)和人工智能(AI)可以通过远程操作来简化农民的任务,同时允许它们实现对输入和输出的自动和精确控制,并提高系统的整体效率。本评论的重点是使用这些智能技术来分析,监测和维持良好的水质和适当的水培技术补充。还讨论了确定的研究差距和未来在该领域的未来可能贡献。

无人固定翼飞机气动外形优化
1 助理教授,2,3,4 本科生 1,2,3,4 机械工程系,1,2,3,4 戈达瓦里工程技术学院,Rajamundry-533296,安得拉邦,印度 摘要:遥控的重要性日益增加,这刺激了能够飞行的无人驾驶飞行器 (UAV) 的发展,从小型昆虫大小的无人机到大型传统飞机。这些无人机在农业、监视、环境监测、搜索和救援、航空摄影、基础设施检查和科学研究领域有着广泛的应用。本研究旨在通过使用完全自动化的工作流程提高 0 度攻角 (AOA) 下的升阻比来优化固定翼无人机的气动形状。我们的研究包括遗传算法 (GA),它模仿自然选择的进化过程以在复杂的问题空间中发现最优解,以及 PyFluent,一种强大的计算流体动力学 (CFD) 工具。这项工作分为三个阶段:初始阶段、优化阶段和模拟阶段。最佳翼型配置在 0 度 AOA 时实现 24.8 的升阻比,特别是在 40 m/s 的速度下。索引术语 - 无人机、升阻比、0 度 AOA、遗传算法 (GA)、PyFluent I. 简介

跋涉通道的可照相机抑制剂控制野生型疼痛完整自由移动动物
通过赋予神经元活性的光控制,光遗传学和光学药理学是强大的方法,可用于探测疼痛信号的传播。但是,成本,动物处理和道德问题减少了他们的传播和常规使用。在这里,我们报告了Laki(光激活的K +通道抑制剂),这是一种与疼痛相关的两孔域钾跋涉和TRESK通道的特定照片开关抑制剂。在黑暗或环境光中,Laki不活跃。然而,在365 nm和480 nm处的经透明膜不可逆地阻止了伤害感受器中的徒步旅行/tresk电流,从而可以快速控制完整的疼痛和伤害感,并自由移动的小鼠和刺激性。这些结果表明,在体内,跋涉/TRESK在伤害感受器的自由神经末端的亚细胞定位,其中它们的急性抑制作用具有足够的能力引起疼痛,显示了Laki作为跋涉/TRESK通道研究的宝贵工具。更重要的是,Laki具有在幼稚的动物中无创和植物学方式可逆遥控的疼痛的能力,该动物在基本和转化性疼痛研究中具有实用性,但在体内镇痛药物筛查和验证中也没有遗传操纵或病毒感染。
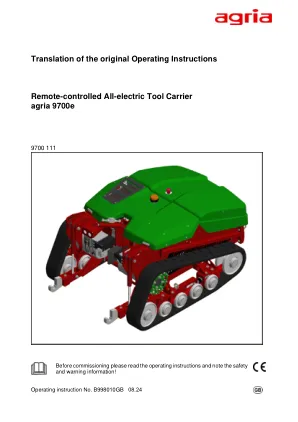
翻译原始操作说明远程...
机器符合当前的艺术状态,并符合在经过证明的使用情况下进行营销时适用的安全法规。在设计方面,不可能消除可预见的滥用或造成风险,而不会限制法规的功能。遥控的实施载体Agria 9700E是一台用于安装和操作批准的已安装工具(预期用途)的机器。该机器旨在在理想条件下处理高达50°的梯度。任何其他用途都被认为违反了预期目的。制造商对这种使用造成的任何损害不承担任何责任,风险完全是用户自己的。预期的用途还包括遵守制造商规定的运营,维修和维护条件。对机器的未经授权更改,尤其是对安全设备的更改可能会导致危险水平增加,这将排除任何制造商对造成的损害的责任。使用未批准的蝙蝠造成的损害明确排除在保修中。必须按照操作说明中的指示操作机器。如果需要,其他操作员必须提供指令。任何不当使用或执行这些指令中未描述的机器的活动,构成未经授权的滥用,并且不在制造商责任的统计范围内。对机器的使用不当会危害人员,并可能损坏操作员的机器或其他属性。它也可能损害机器的功能。

仓鼠:...
大型模型已显示出对视觉和语言中复杂问题的强烈开放概括,但是它们在机器人技术中的部署相对较难。这一挑战主要源于缺乏可扩展的机器人训练数据,因为这需要昂贵的机器人收集。对于可扩展的培训,这些模型必须显示跨域的大量传输,以利用廉价可用的“偏离”数据,例如视频,手绘草图或模拟数据。在这项工作中,我们认为,层次视觉语言 - 行动模式可以比标准的单片视觉语言行动模型更有效地在域上传输行为。尤其是我们研究了一类Hier-Archical Vision-Language-Action模型,其中高级视觉语言模型(VLMS)在相对便宜的数据上训练,以产生具有语义意义的中间预测,例如2D路径,表明所需的行为。这些预先指定的2D路径是3D感知且能够精确操作的低级控制策略的指导。在这项工作中,我们表明将预先字典分开为语义高级预测,而3D感知的低级预测可以使这种层次结构的VLA策略可以跨越重要的域间隙转移,从模拟到现实世界或跨场景,具有巨大变化的视觉效果。这样做可以使用廉价,丰富的数据源,除了遥控的机上数据,从而实现了广泛的语义和视觉通用。我们证明了如何通过模拟和现实世界中的实验进行语义,视觉和几何概括来实现语义,视觉和几何概括的机器人操作,以实现机器人操作。
启用技术的杂种心脏康复
冠心病(CHD)是英国死亡的主要原因。临床指南建议心脏康复(CR),包括健康教育,降低心血管风险建议,体育活动和压力管理组件。但是,基于组的CR的吸收仅约50%。混合心脏康复(CR),合并面对面和远程服务交付,可以改善CR的吸收并减少服务访问的不平等现象。本研究使用焦点小组和半结构化访谈来探索使用Active + Me Remote Hybrid CR App的员工和患者经验,该平台可访问教育模块,行为改变支持,实时运动课程,体育锻炼课程,体育锻炼,体育活动和健康监测,包括英格兰以东的三个地点。十二名员工和六名患者参加了会议。主题指南探讨了参与者在与混合CR通路相关的交付或接收混合CR,障碍和辅助因子方面的经验,以及对未来Active + Me遥控的实施的影响。定性数据远程收集,音频记录并独立转录。使用合并实施研究框架(CFIR)对员工数据进行了演绎分析。使用主题分析对患者数据进行归纳分析。尽管有一些技术问题和治理延迟,但Active + Me Remote被认为是可接受,方便和允许裁缝以满足患者的需求和情况。必须允许足够的时间进行员工培训并支持患者入学混合服务。来自可穿戴设备(血液肯定监测器)的数据上传,使员工可以监视患者的进度,并授权患者指导他们的康复。员工最初认为他们应该筛选患者,以确保提供混合CR来数字识字,身体活跃的人,尽管随着员工对应用程序的熟悉程度的增加,筛查变得不太常见。的发现表明,混合CR的有效培训需要系统级资源,以促进治理批准,并作为标准护理嵌入混合CR交付。该研究于3/7/2023(ISRCTN320764)进行了注册。
自动驾驶汽车感知能力的进步:从数据集收集到场景解释
自动驾驶汽车(AV)应为我们的最终地面运输形式。无疑,要实现完全自主驾驶还有很长的路要走。然而,我们对AV的探索的历史也很长,可以追溯到1920年代的第一个繁荣时期[1]。从技术上讲,早期的尝试不是自动驾驶,而是在某种程度上是遥控的,这只是将驾驶员移开车辆。当时,此任务需要集成同样智能的车辆和道路[2]。标志性的开创性实验之一发生在1950年代;通用汽车将电路嵌入公共高速公路的一部分,以展示自我引导系统[3];尽管自动驾驶系统不在汽车内部,但它实现了AV的基本图像。通用电动机的实验反映了当时的研究浓度,AVS使用道路干扰车辆的行为以实现自动驾驶并消除驾驶员错误[4]。20世纪下半叶,综合电路的兴起将AV研究的范围从建造所谓的道路转变为开发智能车辆,因为计算机和传感器足够小,可以在普通的生产车中使用。计算机视觉和机器学习的出现标志着AV的快速进步,这被视为独立的运输能够感知环境并浏览多种传感器读数。对AV的期望正在解决与普通车辆相关的问题问题,包括污染,拥塞和交通总额[5]。随着AV的自动化和智力的发展,研究人员提出了超过技术观点的关注[6]。在所有道德和道德问题中,AV的安全引起了最大的关注[7]。安全的承诺要求AV技术已提高并与所有功能视角集成在一起,这些视角被归类为工作中的四个障碍[8]:感知,计划和决策,措施,动力和车辆控制以及系统监督。本文的重点是AV的感知能力。尽管AV的历史已经准备好了几十年,但AV感知的视野模棱两可,并且随着新兴技术的发展而发展。在一开始,感知通过分析AV和其他物体的距离来驱散周围环境的地图扮演辅助作用[9]。例如,同时定位和映射(SLAM)算法模糊了感知和映射之间的边界。但是,由于计算机视觉技术的快速发展,AVS的感知定义正在发展。快速而精确的对象检测和分类功能导致了整合感知和计划/决策阶段的建议。工作[10]是一种著名的早期尝试,它采用了整合思想,名为“直接感知”范式。与我所介绍的感知[11]和行为反射感知[12]相比,在本文中提到的直接掌握将更多的计算资源分配给环境感知,并旨在通过很少的经典映射和本地化阶段实现自主驾驶。工作的本质[10]是基于卷积神经网络(CNN)模型,该模型将图像映射到几个关键的预测指标,例如车辆对道路的方向以及与其他与道路相关的物体的距离。显然,由于神经网络在早期的局限性上,该建议是解析整个场景(介导的感知)和将图像直接映射到驾驶动作(行为反射感知)之间的贸易。因此,全局映射和本地化仍然存在于其过程中。尽管如此,直接受访方法激发了研究人员在AV感知领域中利用深度学习技术的潜力的兴趣[13]。