XiaoMi-AI文件搜索系统
World File Search System钥匙孔
钥匙孔模式多层激光的同步加速器成像
摘要 - 构成物联网(IoT)的数十亿个对象,预计将生成量的数据量。各种自动化服务(例如监视)将在很大程度上取决于使用不同的机器学习(ML)算法。传统上,ML模型由集中式云数据中心处理,在该中心,IoT读数通过访问,地铁和核心层中的多个网络啤酒花将云卸载到云中。这种方法不可避免地会导致过度的网络功耗以及服务质量(QoS)降解,例如增加延迟。相反,在本文中,我们提出了一种分布式的ML方法,除了云外,还可以在IoT节点和雾式服务器等中介设备中进行处理。我们将ML模型抽象成虚拟服务请求(VSR),以表示深神经网络(DNN)的多个互连层。使用混合整数线性编程(MILP),我们设计了一个优化模型,该模型以能源有效的方式在云/雾网络(CFN)中分配DNN的层。我们评估了DNN输入分布对CFN性能的影响,并将这种方法的能效与基线的能源效率进行比较,在该基线中,在集中式云数据中心(CDC)中处理了所有DNN的所有层。

激光离轴角对铝合金(AA1050)在激光焊接过程中的孔隙率,流体流量和钥匙孔形成的影响
电动汽车(电动汽车)中座舱对电池选项卡的激光焊接至关重要。确保焊接质量至关重要,因为它取决于诸如孔隙率的产生,熔融池中的流体流动,施加激光功率和焊接速度等因素。然而,常规激光焊接技术主要侧重于沿焊接距离调节激光参数,努力有效地减轻孔隙率的形成。虽然对激光角沿焊缝截面的效应进行了广泛的研究,但尚未探索过轴轴激光角的影响,即在垂直于焊接方向的平面中的角度的效果,尚未探索。这项研究通过在不同激光能密度下改变激光轴轴的角度,以优化专门为减少孔隙率的过程,从而引入了一种创新的激光焊接方法。通过实施铝AA1050的激光焊接的三维计算流体动力学(CFD)模型,我们在采用不同的离轴角度的同时提供了详细的分析流体流量和熔体池尺寸。我们的模型结合了多种反射,向上的蒸气压和后坐压力,以解释不同激光轴轴轴的孔隙率的形成。结果表明,在优化的激光功率和焊接速度下增加激光轴的角度可显着降低孔隙率。在激光外轴角为4.92°时,数值分析与实验熔体池宽度为11%,最小误差为2.74°,最小误差为2.6%。对于熔体池深度,在4.92°的离轴角度为4.2%,最小差为7.2%,在7.42°的离轴角度下的最小差为0.5%。本研究提出了一种通过解决孔隙形成的特定挑战来改善激光焊接过程的新方法。

激光离轴角对铝合金(AA1050)在激光焊接过程中的孔隙率,流体流量和钥匙孔形成的影响
电动汽车(电动汽车)中座舱对电池选项卡的激光焊接至关重要。确保焊接质量至关重要,因为它取决于诸如孔隙率的产生,熔融池中的流体流动,施加激光功率和焊接速度等因素。然而,常规激光焊接技术主要侧重于沿焊接距离调节激光参数,努力有效地减轻孔隙率的形成。虽然对激光角沿焊缝截面的效应进行了广泛的研究,但尚未探索过轴轴激光角的影响,即在垂直于焊接方向的平面中的角度的效果,尚未探索。这项研究通过在不同激光能密度下改变激光轴轴的角度,以优化专门为减少孔隙率的过程,从而引入了一种创新的激光焊接方法。通过实施铝AA1050的激光焊接的三维计算流体动力学(CFD)模型,我们在采用不同的离轴角度的同时提供了详细的分析流体流量和熔体池尺寸。我们的模型结合了多种反射,向上的蒸气压和后坐压力,以解释不同激光轴轴轴的孔隙率的形成。结果表明,在优化的激光功率和焊接速度下增加激光轴的角度可显着降低孔隙率。在激光外轴角为4.92°时,数值分析与实验熔体池宽度为11%,最小误差为2.74°,最小误差为2.6%。对于熔体池深度,在4.92°的离轴角度为4.2%,最小差为7.2%,在7.42°的离轴角度下的最小差为0.5%。本研究提出了一种通过解决孔隙形成的特定挑战来改善激光焊接过程的新方法。
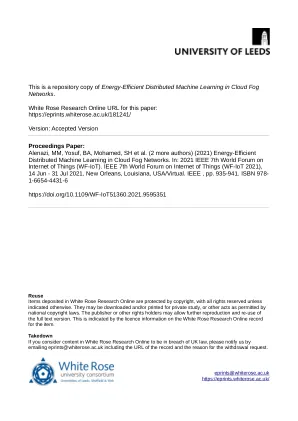
基于位置的动力学模拟器的大脑变形器,用于钥匙孔神经外科手术和术中控制的动力学模拟器
摘要 - 机器人辅助手术中的许多任务需要计划和控制操纵器与高度变形对象相互作用的动作。这项研究提出了一种基于位置动力学(PBD)模拟的现实,时界的模拟器,该模拟器模拟了由于导管插入术前术前计划计划和钥匙孔外科手术程序内的术中指导而导致的大脑变形。它通过考虑变形模型,嘈杂的感应和不可预测的驱动中的不确定性来最大化成功的可能性。PBD变形参数是在平行p的模拟幻影上初始化的,以获得对脑白质的合理起始猜测。通过比较所获得的位移与复合水凝胶幻像中导管插入的变形数据进行校准。知道灰质大脑结构的不同行为,对参数进行了细小的调整以获得广义的人脑模型。将大脑结构的平均位移与文献中的值进行了比较。模拟器的数值模型对文献采用了一种新颖的方法,并且通过使用记录的Vivo动物试验的记录变形数据,平均不匹配为4.73±2.15%,它已被证明与实际脑变形密切相匹配。稳定性,准确性和实时性能使该模型适合为KN路径计划,术前路径计划和术中指导创建动态环境。
Comtech空间与组件技术公司...
•无基质钥匙孔•全半球覆盖范围•无电缆包裹•两个相同的驱动链•简单且低维护•高可靠性•高可靠性•低功耗•较低的生产成本•运营的灵活性 - leo/meo/heo/heo/geo•我们已经使用了经过证明的,现有的机械想法
LockState Safe LS-17en的操作说明
1。首次打开保险箱以首次打开保险箱,卸下前面面板上的小型中央贴纸,该贴纸上有钥匙的图片(请参见下图2中的“ Z”)。这将揭示下面的钥匙孔。将钥匙插入钥匙孔,然后逆时针旋转,同时旋转门把手,然后将安全门拉开。2。安装电池安全需要4个“ AA”(1.5V)电池。电池室(请参见图1中的“ Z”)位于门的背面。卸下电池盖,然后将电池安装到隔间中,以确保电池装有正确的相应极性。安装电池后,关闭电池舱。3。编程代码A。按铰链附近门后部的红色按钮(请参见图1中的“ X”),释放它,您会听到两个哔哔声。B.现在输入您希望用作组合的代码(3至8位),并在15秒内按键盘上的“ B”按钮确认。如果您等待太久,然后按“ B”按钮,则需要重新开始。C.立即写下您的新组合并测试您的新组合以确保已编程。
具有机器人辅助妇科手术(RAS)
机器人辅助手术是一种最小的浸润性手术(钥匙孔手术)的一种形式,您的外科医生分别进行4-5个切口,每个切口长约0.5-1 cm。之后,他或她坐在您旁边的控制台上,允许它们在3-D中看到,以示为晶体清除,放大的手术区域的视图,以及在身体内部具有额外运动范围的控制仪器。
通过多模式过程监测和X射线X射线照相在激光粉床融合过程中局部钥匙孔预测
免责声明本文件是作为由美国政府机构赞助的工作的帐户准备的。美国政府和劳伦斯·利弗莫尔国家安全,有限责任公司,或其任何雇员均不对任何信息,设备,产品或流程的准确性,完整性或有用性承担任何法律责任或责任,或承担任何法律责任或责任,或者代表其使用不会侵犯私有权利。以本文提及任何特定的商业产品,流程或服务,商标,制造商或其他方式不一定构成或暗示其认可,建议或受到美国政府或Lawrence Livermore National Security,LLC的认可。本文所表达的作者的观点和意见不一定陈述或反映美国政府或劳伦斯·利弗莫尔国家安全,有限责任公司的观点和观点,不得用于广告或产品代表目的。

手持外壳(1599年)
圈接头结构可保护防止灰尘和溅水。没有电池门的版本旨在满足IP54评级。额外的深层和超浅基底是专门设计的,以增强外壳的美学,并为用户提供灵活性和组装效率。将两个钥匙孔敲除底座内部模制,以促进壁挂安装。如果需要EMI/ RFI屏蔽,请尝试1599RFI系列 div>
