XiaoMi-AI文件搜索系统
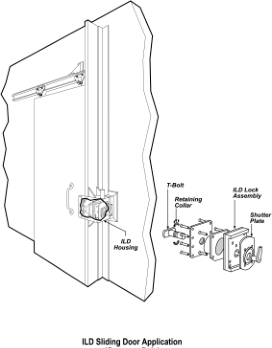
World File Search System锁杆

型号SW自锁弹簧螺栓
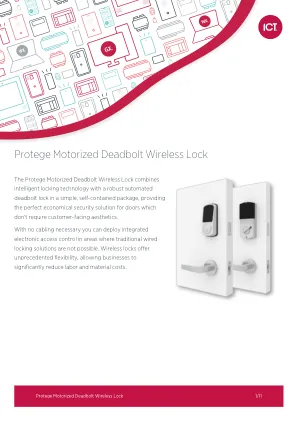
使用Proxtraq和MobileTraq Apps/Portals管理访问,从而从一个集中式平台启用了企业安全管理。生成详细的审核跟踪,以监视用户活动和锁定锁定尝试,并通过远程注册RFID卡和智能手机简化操作。

FRR 525 - 黑锁五十铃
发动机:SiTEC 220(五十铃 6HK1-TCC) 类型:6 缸、4 冲程、24 气门、SOHC、直喷柴油机。涡轮增压和空对空中冷。可调式滚柱式摇臂。 排量:7,790 cc 压缩比:16.8:1 缸径 x 冲程:115 x 125 mm 最大功率(DIN NET):164 kW @ 2,400 RPM 最大扭矩(DIN NET):668 Nm @ 1,500 RPM • 排放标准:ADR 80/00(USEPA 1998)• 板式油冷却器。13.5 L 油容量。组合式全流量主滤清器和旁通油滤清器。 冷却系统 • 8 叶片、直径 640 mm 的冷却风扇,带恒温控制粘性离合器。 • 散热器正面面积:4,452 cm2 • 23 L 冷却液容量。进气系统 • 垂直进气口安装在驾驶室后部。两级 Donaldson 空气净化器,主滤芯为 280 x 380 mm,副滤芯为 160 x 350 mm。• 540 x 580 mm 空对空中冷器。燃油系统 • Denso 共轨燃油喷射。独立的燃油滤清器和水分离器。• 180 L 钢制油箱。

机器人夹持器的自锁欠驱动机构
摘要 — 我们描述了一种新型机电一体化机器人夹持器的设计概念和第一个原型,该夹持器旨在安装在人形机器人上,以实现牢固(即锁定)和稳健的抓握。这种抓握可以理想地支持复杂的多接触运动,例如爬梯子或操纵复杂工具,同时节省能源。为此,我们提出了一种解决方案,即设计一种智能自锁欠驱动机构,该机构与执行器并联安装,当实现所需的抓握时自动触发。该设计通过差速齿轮利用夹持器和制动器之间的可调功率分配。我们的夹持器具有自适应、牢固抓握和节能的优势,并通过原型夹持器进行了实验。


第一部分 - 关于纤维杆 - 米兰的理工
Fibreloop项目是Marie Sklodowska-Curie(MSCA)博士网络,旨在促进复合材料的循环经济战略的工业实施。将培训14名博士候选人,以解决复合部分的回收,直至设计和生产新的回收组件。主题包括当前和新回收技术的评估,增强和开发;回收材料行为的实验评估;回收复合材料和零件的材料模型和设计方法的开发;以及将回收的复合材料和循环经济实施实施到现实生活中的工业案例中。Fibreloop涉及18个欧洲大学和公司。

沃尔沃宣传册 紧凑型轮式装载机 L30Bpro L35Bpro 英文版
传动装置:静液压传动装置,在负载下全动力换挡,无论是在改变方向(前进和后退)时还是在范围之间。在所有范围内均可实现最大牵引力。“英寸/制动踏板”用于可变机器速度控制,并在发动机转速恒定时将动力传输到铲斗液压系统。多功能杆用于改变方向、差速锁和使用伺服控制。车轴:由两个刚性门式车轴实现全轮驱动。差速锁:两个车轴均采用液压驱动的 100% 差速锁。车架:坚固的前后车架,机器人焊接。铰接式摆动接头可实现最佳机动性和牵引力。

Schlage NDE 系列无线锁数据表
NDE 无线锁将锁、凭证读取器、门位置传感器和请求退出开关整合到一个装置中,从而简化了安装。NDE 无线锁采用标准 ND 圆柱形门准备,只需一把十字螺丝刀即可在几分钟内完成安装;无需安装其他组件、钻孔或在每个开口处布线。NDE 配有最流行的 Schlage ND 杆、钥匙槽和饰面,可提供满足几乎所有设施要求的有吸引力的选择。NDE 非常适合办公室和套房入口、会议室、公共区域门、居民单元和带有圆柱形门准备的敏感存储区域。
沃尔沃宣传册 紧凑型轮式装载机 L30Bpro L35Bpro 英文版
传动装置:静液压传动装置,在负载下全动力换挡,无论是在改变方向(前进和后退)时还是在范围之间。在所有范围内均可实现最大牵引力。“英寸/制动踏板”用于可变机器速度控制,并在发动机转速恒定时将动力传输到铲斗液压系统。多功能杆用于改变方向、差速锁和使用伺服控制。车轴:由两个刚性门式车轴实现全轮驱动。差速锁:两个车轴均采用液压驱动的 100% 差速锁。车架:坚固的前后车架,机器人焊接。铰接式摆动接头可实现最佳机动性和牵引力。