XiaoMi-AI文件搜索系统
World File Search System门扫

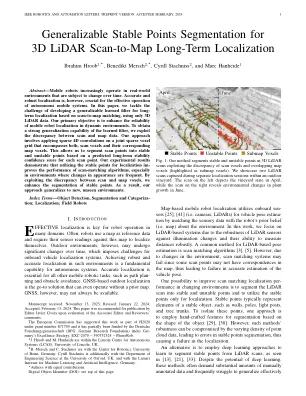
3D激光雷达扫描到地图长期定位的可推广稳定点细分
摘要 - 动物机器人越来越多地在实际会随着时间而变化的现实环境中运行。准确且健壮的本地化对于自动移动系统的有效运行至关重要。在本文中,我们仅使用3D LIDAR数据来应对基于扫描到地图匹配的长期本地化开发可推广的学习过滤器的挑战。我们的主要目标是提高动态环境中移动机器人本地化的可靠性。为了获得学习过滤器的强大概括能力,我们利用扫描和MAP数据之间的差异。我们的方法涉及将稀疏的4D卷积应用于包含扫描素及其相应地图体素的关节稀疏体素电网上。这使我们可以根据每个扫描点的长期稳定置信分数将扫描点分为稳定且不稳定的点。我们的实验结果表明,利用稳定点进行定位 - 证明了扫描匹配算法的性能,尤其是在外观变化频繁的环境中。通过利用扫描和地图体素之间的差异,我们增强了稳定点的分割。因此,我们的方法概括为新的,看不见的环境。
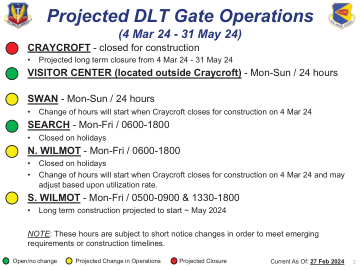
预计 DLT 门操作
• 节假日休息 • 营业时间将从 3 月 4 日 Craycroft 因施工而关闭时开始更改,并可能根据利用率进行调整。S. WILMOT - 周一至周五 / 0500-0900 和 1330-1800


物理疗法脱离门-ESTASL
我们认为,获得硕士学位的物理治疗师(第7级)也可以在不可预测的环境和确定的领域中获得复杂决策和风险管理的能力。当他们在其一个专业领域之一(神经物理疗法,物理物理疗法或积极衰老和物理疗法)中获得物理疗法的硕士学位时,物理治疗师的重点是临床实践,教学,调查或管理的特定方面,在这些领域的复杂性和关键决策中,在这些领域的研究中,可以深入研究这些领域的硕士硕士,该领域是物理学硕士; Extas intas in extas intas in extas intas in extas in extas in extas in extas intas in n extas。因此,ESTASL的物理疗法硕士学位的学院想赞美自2018年以来在本文档中收集本硕士学位的物理治疗师,所有工作通过其披露的文章或口头交流或海报的形式而公开的所有工作。我们想强调所做的工作质量以及其作者的持久性,意志和韧性,以及对一组知识,技能和态度的贡献,这些知识,技能和态度是物理治疗师专业技能的一部分。公众对最终工作的传播使大师进行的研究的科学成果更加平均并得到了门外治疗师和其他卫生专业人员的认可,从而突出了在全国范围内以及在卓越的教学方面,在教育方面的卓越范围内,强调了公认的高等教育机构的工作。
CNOT 门量子电路
受控 Pauli-X 门,也称为 CNOT 门,是量子电路中非常常见且有用的门。这种门涉及 -量子比特系统中的两个量子比特 i 和 j。两个量子比特中的一个(称为量子比特 i )是目标量子比特,而另一个量子比特起控制作用。当控制量子比特 j 处于 | 1 ⟩ 状态时,将 Pauli-X 门(即非门)应用于目标量子比特 i ,该门会被翻转。当量子比特 j 处于 | 0 ⟩ 状态时,量子比特 i 不会发生任何事情。实际上,CNOT 门在量子计算和量子信息领域至关重要。事实上,单量子比特幺正门和 CNOT 门一起构成了量子计算的通用集:-量子比特系统上的任何任意幺正操作都可以仅使用 CNOT 门和单量子比特幺正门来实现(有关这一重要结果的完整证明,请参阅 [29,第 4.5.2 节])。 因此,在当前的实验量子机中,许多多量子比特门都是使用 CNOT 门和其他单量子比特门实现的。 在图 3 中,我们给出了这种实现的几个经典示例:可以使用 3 个 CNOT 门模拟 SWAP 门,可以通过 2 个 Hadamard 单量子比特门和一个 CNOT 门实现受控 Pauli-Z 门。 例如,这些实现用于 IBM 超导 transmon 设备(www.ibm.com/quantum-computing/)。