XiaoMi-AI文件搜索系统
World File Search System队形

法国巡逻兵荣获 ICARE 2023 奖......
法国巡逻兵飞行表演队(PAF,即“法国巡逻兵杂技团”)驻扎在普罗旺斯地区萨隆的 701 空军基地,是世界上最古老的特技飞行巡逻队之一,也是空天军的形象大使。该小组由 9 名飞行员、约 40 名机械师以及秘书、运营人员、摄影师和通讯官员组成。大约有 60 名来自空天军作战中队的热情志愿飞行员每天为军队服务。在航展期间,巴基斯坦空军通常以 8 架飞机为一组进行飞行表演,进行持续约 20 分钟的令人眼花缭乱的飞行表演,其间交替进行着壮观的队形变化和令人印象深刻的交叉飞行。
Microsoft Word - 20240625_NP_BEA-É_ENQ_安全调查报告_R-2023-15-A.docx
2023 年 10 月 10 日上午 10 点 20 分左右,SDTS 公司运营的两架 MB-339 从尼姆加龙机场 (LFTW) 起飞执行近距离巡逻。在 IMC 4 的初始爬升过程中,超过 350 英尺时,机组人员遭遇了剧烈碰撞。机长注意到动力大幅下降,随即改变队形,试图重新点火但没有成功,然后左转以避开人口稠密的地区,并命令飞机撤离。后排乘客弹射出去,飞行员紧随其后。 MB-339 坠落在森林边缘的地面并突然起火。飞行员和乘客在附近降落。他们很快获救并被疏散到尼姆的 CHU 5。司机和乘客受重伤。 MB-339 已被彻底摧毁。安全调查组组成

飞机系统和控制讲义 - IARE
电子支援措施(ESM),提供敌方发射器的发射器信息、范围和方位 磁异常探测器(MAD),在攻击前确认海面下大型金属物体(潜艇)的存在 声学传感器,提供检测和跟踪水下物体通过的手段 任务计算,整理传感器信息并提供融合数据 防御辅助设备,提供检测导弹袭击和部署对抗措施的手段 武器系统,用于武装、指挥和从飞机武器站发射武器 使用各种不同的视距、高频(HF)或卫星通信系统进行通信 定位保持,在无法使用定位灯的条件下,提供安全保持队形的手段 电子战系统,检测和识别敌方发射器,收集和记录流量,并在必要时提供干扰传输的手段 摄像机,用于记录武器效果,或为情报目的提供高分辨率地面图像 平视显示器,为机组人员提供主要飞机信息和武器瞄准信息头盔显示器为机组人员提供主要飞行信息和武器信息,同时允许头部自由活动,数据链路使用数据而不是语音在安全通信下传输和接收消息
总统的航空航天报告
在标题页上,从左上角开始顺时针方向:1. 2021 年 5 月 18 日,在一次多国演习中,两架美国空军 F-35A Lightning II 飞机和两架法国阵风飞机在法国上空飞行时打破队形。来源:空军中士亚历山大·库克。2. 这张 2022 年 7 月 12 日曝光的图像由美国宇航局的詹姆斯·韦伯太空望远镜在红外光下拍摄,显示了船底座星云中附近年轻的恒星形成区域 NGC 3324,揭示了之前被遮蔽的恒星诞生区域。来源:NASA、ESA、CSA 和 STScI。3. 一架 UAS 飞入 Pebble Hill 位置 Block B/Unit C2 的烟柱中,Tall Timbers 研究站。来源:USGS/Todd Hoefen。 4. 2022 年 1 月 31 日,猎鹰 9 号火箭从佛罗里达州卡纳维拉尔角太空军基地发射。图片来源:太空军 Joshua Conti。5. GOES-17 卫星捕捉到了这幅由 Hunga Tonga-Hunga Ha'apai 火山水下喷发产生的巨大云层的图像,拍摄于 2022 年 1 月 15 日。图片来源:NASA 地球观测站,图片由 Joshua Stevens 使用 NOAA 和 NESDIS 提供的 GOES 图像拍摄。6. 这张照片由火星 2020 号航天器下降级上的相机拍摄,显示了 NASA 的毅力号火星车在 2021 年 2 月 18 日着陆火星之前的样子。图片来源:NASA/JPL-Caltech。
总统航空航天报告
在标题页上,从左上角开始顺时针方向:1.2021 年 5 月 18 日,在一次多国演习中,两架美国空军 F-35A Lightning II 飞机和两架法国阵风飞机在法国上空飞行时打破队形。图片来源:空军中士。亚历山大·库克。2.这张 2022 年 7 月 12 日曝光的图像由美国宇航局的詹姆斯·韦伯太空望远镜在红外光下拍摄,显示了船底座星云中附近年轻的恒星形成区域 NGC 3324,揭示了之前被遮蔽的恒星诞生区域。图片来源:NASA、ESA、CSA 和 STScI。3.一架 UAS 飞入 Pebble Hill 地点 Block B/Unit C2 的烟雾柱中,Tall Timbers 研究站。图片来源:USGS/Todd Hoefen。4.2022 年 1 月 31 日,猎鹰 9 号火箭从佛罗里达州卡纳维拉尔角太空军基地发射。 图片来源:Joshua Conti,太空部队。5.GOES-17 卫星捕捉到了这张由 Hunga Tonga-Hunga Ha'apai 火山于 2022 年 1 月 15 日水下喷发产生的巨大云层图像。 图片来源:NASA 地球观测站,Joshua Stevens 使用 NOAA 和 NESDIS 提供的 GOES 图像拍摄。6.这张照片由火星 2020 号航天器下降级上的摄像机拍摄,显示了美国宇航局的毅力号火星车于 2021 年 2 月 18 日着陆火星之前的样子。图片来源:NASA/JPL-Caltech。

证书 Fnit 引文 (A
1966 年 8 月 18 日,澳大利亚皇家军团第六营 D 连在与越南敌军的军事行动中表现出非凡的英雄主义。“在越南共和国福绥省巴地东北部的一个橡胶种植园中搜寻越共时,D 连遇到了越共,并立即展开了激烈交战。随着战斗的发展,D 连的士兵显然面临着数量上占优势的部队。D 连的排被一支增援敌军包围,四面八方使用自动武器、轻武器和迫击炮攻击。D 连的士兵们勇敢地与装备精良、意志坚定的敌人作战,保持队形,形成共同的防御圈,给越共造成了重大伤亡。敌人持续不断地猛烈射击,从各个方向反复攻击。每次进攻都被勇敢的澳大利亚人击退。大雨和低云层阻碍了友军在战斗中提供任何近距离空中支援。经过三个小时的猛烈攻击,未能突破。:\澳大利亚防线,敌人撤离战场,伤亡惨重,留下 245 名越共士兵死在 D 连的防御阵地前。D 连的英勇、无畏和不屈不挠的勇气体现了军事勇气的最高传统,为 D 连、第六营、澳大利亚皇家军团和澳大利亚军队赢得了巨大的荣誉。2.美国总统授予越南共和国武装部队下列部队总统单位嘉奖(陆军),根据 AR 672-5-1 的第 1D4 段予以确认。嘉奖文本由林登·约翰逊总统于 1968 年 5 月 2 日签署,内容如下:凭借我作为美国总统和美国武装部队总司令所赋予的权力,我
2022 年俄乌战争
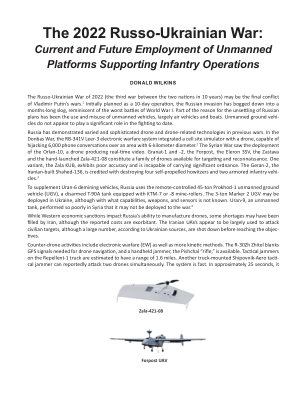
1 Mark Galeotti,《普京的战争:从车臣到乌克兰》(英国牛津:Osprey Publishing,2022 年)。2 同上。3 David Hambling,“乌克兰如何应对俄罗斯的‘蜂群’无人机攻势”,《福布斯》(2022 年 9 月 28 日),访问自 https://www.forbes.com/sites/davidhambling/2022/09/28/how-can-ukraine-counter-russias- swarm-drone-offensive。4 Daniel Brown,“据报道,俄罗斯的 Uran-9 机器人坦克在叙利亚表现糟糕”,Business Insider(2019 年 7 月 9 日),2022 年 12 月 13 日访问自 https://www.businessinsider.com/russias-uran-9-robot-tank-performed-horribly-in-syria-2018-7?r=US&IR=T 。5 David Hambling,“乌克兰战斗机器人加入对抗俄罗斯入侵的战斗”,福布斯(2022 年 6 月 16 日),访问自 https://www.forbes.com/sites/davidhambling/2022/06/16/ukrainian-combat-robots-join-fight-against-rus sian-invasion/?sh=5f7a0e703678 。6 Paul Scharre,《无人军队:自主武器和战争的未来》(纽约:WW Norton Company,2018 年)。7 Joseph Chapa,《远程战争道德吗?》从 7,000 英里外权衡生死问题(纽约:PublicAffairs Hatchette Book Group,2022 年)。8 Jack Watling 博士和 Nick Reynolds,“乌克兰战争为从生存到胜利铺平了道路”,皇家联合服务研究所国防和安全研究特别报告,2022 年 7 月 4 日,访问自 https://rusi.org/explore-our-research/publications/special-resources/ukraine-war-paving-road-survival-victory。9 南华早报,“自主无人机飞过中国竹林”,视频取自 https://www.youtube.com/watch?v=rPul9WKQ6oQ 。10 Edd Gent,“观看一群无人机在茂密的森林中飞行——同时保持队形”,《科学》(2020 年 12 月 16 日),取自 https://www.science.org/content/article/watch-swarm-drones-fly-through- heavy-forest-while-staying-formation 。
航空科学-1,航空历史之旅
航空航天科学:航空史之旅是一门航空史课程,重点关注几个世纪以来的飞行发展。它从古代文明开始,随着时间的推移发展到现代。重点是民用和军用对航空的贡献;空军的发展、现代化和转型;以及简要的天文和太空探索历史。它穿插了飞行原理的简明概述,包括基本航空学、飞机运动和控制、飞行动力和火箭。在整个课程中,有阅读材料、视频、动手活动以及课文和学生练习册练习,以指导巩固所呈现的课程材料。在秋季学期,我们涵盖单元 1 和 2。在春季学期,我们涵盖单元 3 和 4。航空航天科学将占您总课堂时间的 40%。领导力教育:学习和实践空军风俗礼仪、领导风格、个人发展技能、学习习惯、时间管理/个人组织、个人形象、自我形象、健康意识、训练和仪式、军事指挥以及对态度和纪律的高度重视。学员将理解遵守空军核心价值观的重要性,并在应用空军风俗礼仪和着装和仪容标准的同时参加与高年级学员相同的活动。在秋季学期,我们涵盖第 1-2 章。在春季学期,我们涵盖第 3-5 章。领导力教育将占您总课程时间的 40%。操练和仪式:作为领导力教育 (LE) 课程教学的一部分,学员将熟练掌握队形行进、飞行操练、个人面对运动和军事指挥。将重点关注态度和纪律。领导力教育的操练和仪式部分将在课堂环境和操练区域进行。健康计划:詹森海滩高中的 AFJROTC 健康计划旨在通过让学员参与促进和提高健康生活方式、身体健康、运动行为和心理运动表现的活动,培养身体和精神上坚强的品格领导者。健康活动将于每周五举行。健康制服是发放的 AFJROTC PT 制服。所有学生都必须穿着规定的制服参加健康计划课程。先决条件:无。我们将根据你的努力程度和穿着合适的制服进行评分。